
1
旬
1.33
No.22
计算机工程
Computer
Engineering
2007
年
11
月
November
2007
33
卷第
22
期
·人工智
识别技术·
文章编号:
1000--3428(2007)22
--0
203
--0
3
文献标识码
:A
中固分类号
I
TP391
基于不变矩
象匹配
法
周报环,赵晓
(深圳职业技术学院软件工程系,深圳
518055)
摘
要:分析基于灰度匹配方法存在着亮度和裁剪误差,提出基于不变矩景象匹配算法,并对矩不变量作如下改进:用原点矩代替中心矩,
克服平移不变
J
性给不变矩带来的影响;用圆形测量窗代替方形测量窗消除因旋转而产生的裁剪误差;引入亮度因子,克服基准图和匹配图
之间因亮度差异带来的影响;采用金字塔算法减少搜索次数,提高匹配速度。实验表明,基于不变矩下视影像匹配算法具有较好稳定性,
匹配准确率较高。
关镰词:景象匹配;矩不变量;亮度因子;金字塔算法
Scene Matching Algorithm ßased on Moments Invariant
ZHOU
Zhen-huan
,
ZHAO
Ming
(Department
of
Software Engineering, Shenzhen Polytechnic, Shenzhen 518055)
(Abstract)
Since there are errors
of
brightness and
c1
ipping
in
gray-based paring algorithm, a scene matching algorithm based on moments
invariant is developed and improved
,
in
which,
eπ
'Q
r
of
translation invariance is reduced
by
replacing raw moment with central moment,
c1
ipping
error
of
rotation is eliminated by replacing rectangle measurement image with round one,
a
旺
ect
of
brightness
di
仔
erence
between reference map and
real time image is avoided by adding brightness factor and pyramida1 search a1gorithm is adopted to reduce search times and speed up matching rate.
Experiments
show
由
at
matching a1gorithm based on moments invariant is very stable with high accurate rate.
(Key
words)
scene matching; moments
inv
盯
iant;
brightness factor; pyramidal algorithm
1
概述
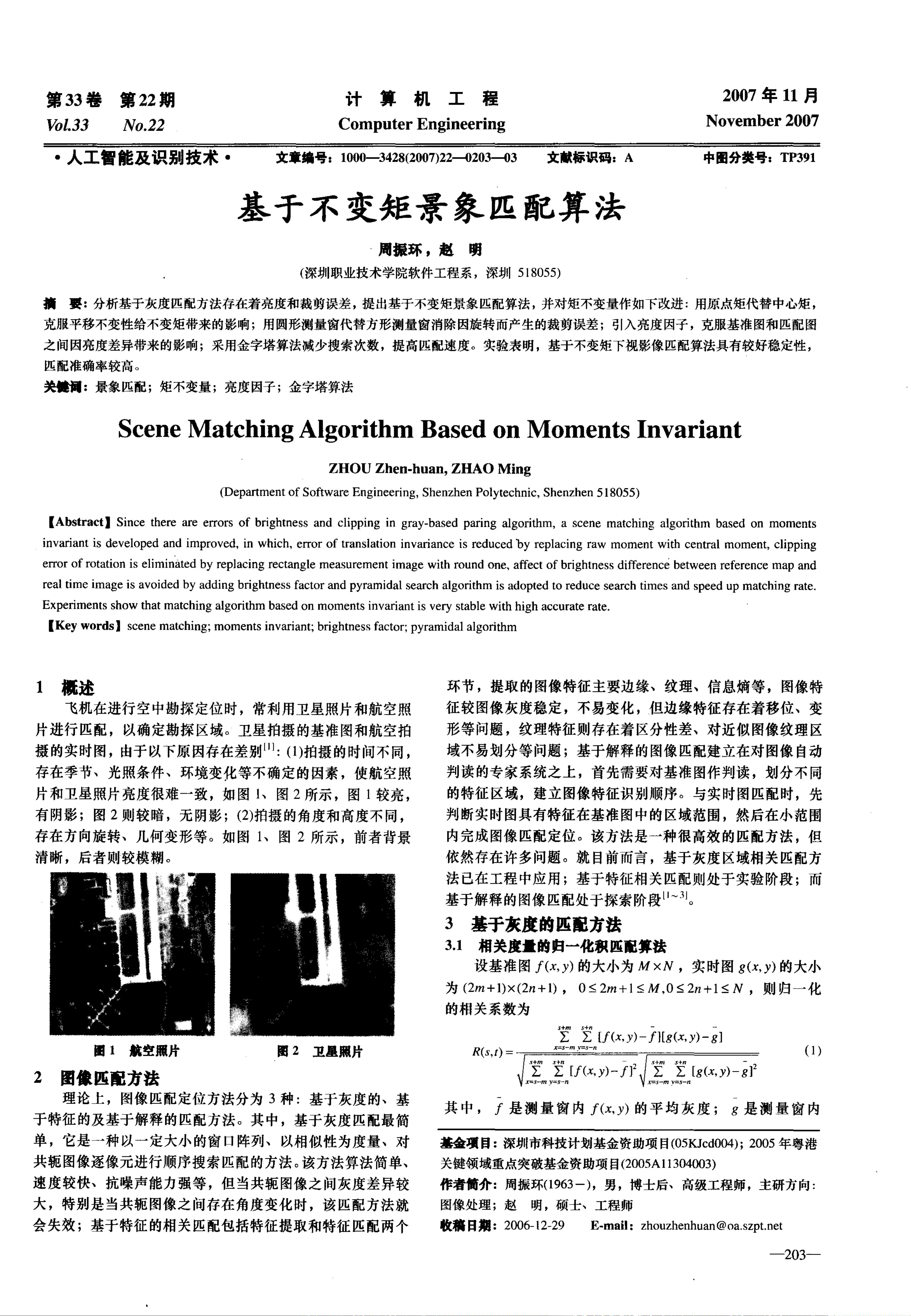
飞机在进行空中勘探定位时,常利用卫星照片和航空照
片进行匹配,以确定勘探区域。卫星拍摄的基准图和航空拍
摄的实时图,由于以下原因存在差别川:
(1)拍摄的时间不同,
存在季节、光照条件、环境变化等不确定的因素,使航空照
片和卫星照片亮度很难一致,如图
l
、图
2
所示,图
l
较亮,
有阴影;图
2
则较暗,无阴影;
(2)
拍摄的角度和高度不同,
存在方向旋转、几何变形等。如图
l
、图
2
所示,前者背景
清晰,后者则较模糊。
环节,提取的图像特征主要边缘、纹理、信息销等,图像特
征较图像灰皮稳定,不易变化,但边缘特征存在着移位、变
形等问题,纹理特征则存在着区分性差、对近似图像纹理区
域不易划分等问题;基于解释的图像匹配建立在对图像自动
判读的专家系统之上,首先需要对基准图作判读,划分不同
的特征区域,建立图像特征识别顺序。与实时因匹配时,先
判断实时图具有特征在基准图中的区域范围,然后在小范围
内完成图像匹配定位。该方法是一种很高效的匹配方法,但
依然存在许多问题。就目前而言,基于灰度区域相关匹配方
法已在工程中应用;基于特征相关匹配则处于实验阶段;而
基于解释的图像匹配处于探索阶段
ll~3lo
3
基于灰皮的匹配方法
3.1
相关度量的归-化积匹配算法
设基准图
f(x
,
y)
的大小为
MxN
,
实时图
g(x
,
y)
的大小
为
(2m+
l)
x(2n+l)
,
0
三
2m+1
三
M
,
0<2n+l<N
,
则归一化
的相关系数为
L L
[f
(x
,
y)-
fJ
[g(x
,
y)-g]
回
1
航空照片
回
2
卫星照片
R(s
,
t)
=
X"'S
-m
l"=s-n
)
l
(
2
固佳匹配方法
理论上,图像匹配定位方法分为
3
种:基于灰度的、基
于特征的及基于解释的匹配方法。其中,基于灰度匹配最简
单,它是一种以一定大小的窗口阵列、以相似性为度量、对
共辄图像逐像元进行顺序搜索匹配的方法。该方法算法简单、
速度较快、抗噪声能力强等,但当共辄图像之间灰皮差异较
大,特别是当共辄图像之间存在角度变化时,该匹配方法就
会失效;基于特征的相关匹配包括特征提取和特征匹配两个
艺艺
[f(x
,
y)-
jf
.l
吉艺
[g(x
,
y)212
x=
s-m
y
可→
n
x=俨
m
,
可
-n
其中
,
f
是测量窗内
f(x
,
y)
的平均灰皮
;
g
是测量窗内
基金项目:深圳市科技计划基金资助项目
(05KJcd004);
2005
年粤港
关键领域重点突破基金资助项目
2005A11304ω3)
作者简介:周振环(1
963
一)
,男,博士后、高级工程师,主研方向:
图像处理;赵明,硕士、工程师
收稿日
M:
2
∞
6-12-29
E-mail:
zhouzhenhuan@oa.szp
t.
net
-203
一
资源评论













