
sensors
Article
Two-Dimensional DOA Estimation for Incoherently
Distributed Sources with Uniform Rectangular Arrays
Tao Wu
1,
*, Zhenghong Deng
1,
*, Yiwen Li
2
and Yijie Huang
1
1
School of Automation, Northwestern Polytechnical University, Xi’an 710072, China; hyjrly@126.com
2
Science and Technology on Combustion, Thermal-Structure and Internal Flow Laboratory,
Northwestern Polytechnical University, Xi’an 710072, China; lee_yiwen@nwpu.edu.cn
*
Correspondence: taowu_nwpu@126.com (T.W.); dthree@nwpu.edu.cn (Z.D.); Tel.: +86-150-2988-2069 (T.W.)
Received: 22 August 2018; Accepted: 18 October 2018; Published: 23 October 2018
Abstract:
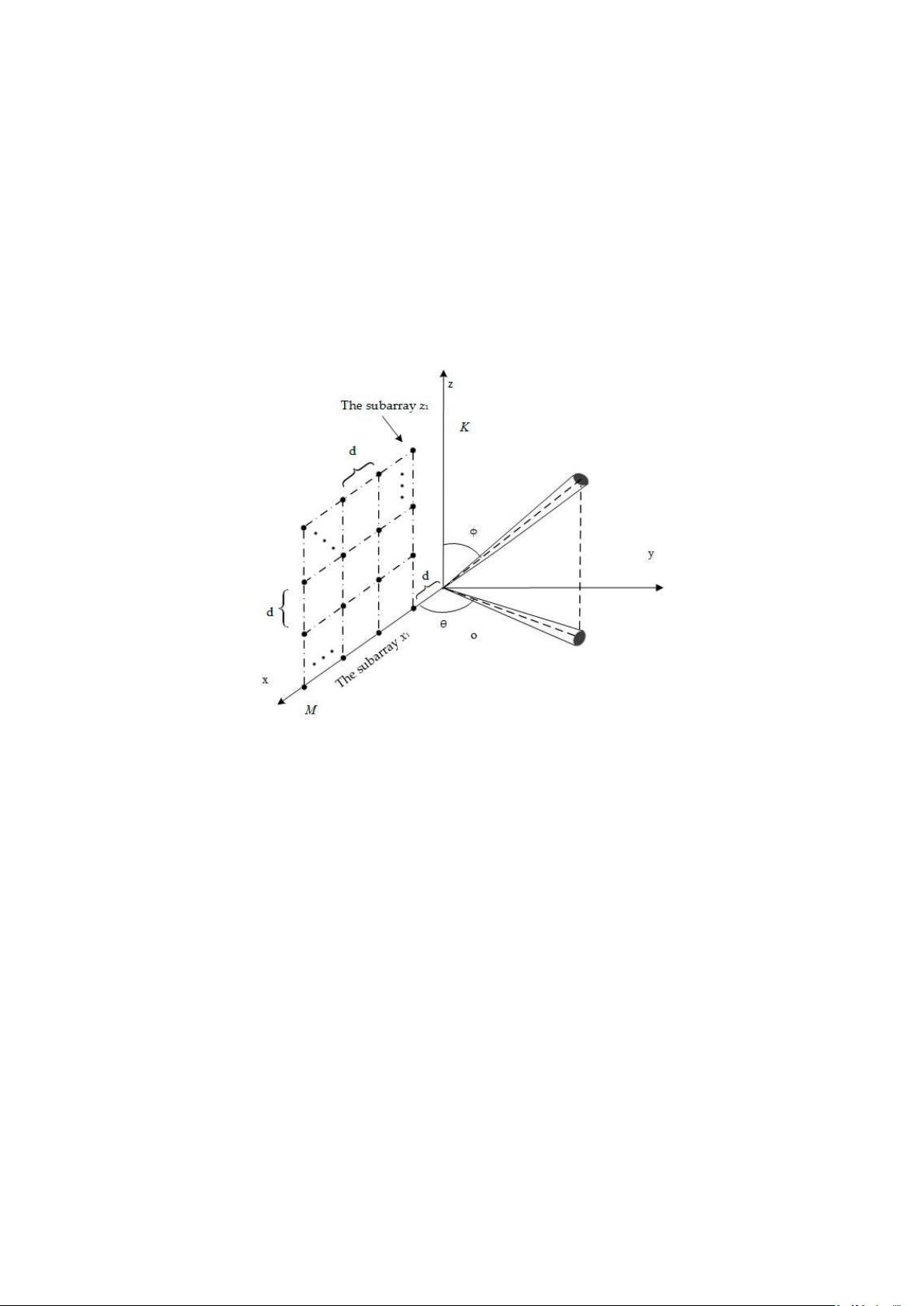
Aiming at the two-dimensional (2D) incoherently distributed (ID) sources, we explore
a direction-of-arrival (DOA) estimation algorithm based on uniform rectangular arrays (URA).
By means of Taylor series expansion of steering vector, rotational invariance relations with regard
to nominal azimuth and nominal elevation between subarrays are deduced under the assumption
of small angular spreads and small sensors distance firstly; then received signal vectors can be
described by generalized steering matrices and generalized signal vectors; thus, an estimation of
signal parameters via rotational invariance techniques (ESPRIT) like algorithm is proposed to estimate
nominal elevation and nominal azimuth respectively using covariance matrices of constructed
subarrays. Angle matching method is proposed by virtue of Capon principle lastly. The proposed
method can estimate multiple 2D ID sources without spectral searching and without information of
angular power distribution function of sources. Investigating different SNR, sources with different
angular power density functions, sources in boundary region, distance between sensors and number
of sources, simulations are conducted to investigate the effectiveness of the proposed method.
Keywords:
incoherently distributed sources; generalized steering matrix; generalized signal vector;
rotational invariance relations; angle matching
1. Introduction
In most applications of array signal processing, traditional DOA estimation is based on point
source models which can simplify calculations. Point source models assume that propagations between
sources and receive arrays are straight paths and the spatial characteristics of sources can be ignored.
In the field of wireless communication, there are obstacles around sources; the propagations from
sources to receive arrays are multipath. In the real surrounding of underwater, on the one hand,
there exist paths from seabed and sea surface of backscatters; on the other hand, spatial scatterers of
targets cannot be ignored when the distances from targets and receive arrays are short. Considering
the spatial scatterers and multipath phenomena, point models cannot characterize sources effectively,
which should be described by distributed source models [
1
]. The signal of a source only propagates
from a single direction through a straight path under the assumption of point source model. Distributed
sources can be regarded as an assembly of point sources within a spatial distribution. The shape of
spatial distribution is related to geometry and surface property of a target in underwater detection for
instance. Spatial distribution of a distributed source can be generally modeled as Gaussian or uniform
with parameters containing nominal angles and angular spreads. Nominal angles represent the center
of targets and angular spreads represent the spatial extension of targets.
According to the scatterers coherence of sources, distributed sources can be classified into
coherently distributed (CD) sources and incoherently distributed (ID) sources [
1
]. CD sources suppose
Sensors 2018, 18, 3600; doi:10.3390/s18113600 www.mdpi.com/journal/sensors

剩余17页未读,继续阅读
资源评论


weixin_38590685
- 粉丝: 3
- 资源: 920









最新资源
- 【项目参考】MATLAB的手写汉字识别(第28期).zip
- 【项目参考】MATLAB的视频图像去雾(第28期).zip
- 【项目参考】MATLAB的小波变换dwt数字水印(第28期).zip
- 【项目参考】MATLAB的语音滤波设计(第28期).zip
- 【项目参考】MATLAB的运动行为检测(第28期).zip
- 【项目参考】MATLAB汉字识别(第28期).zip
- 【项目参考】MATLAB汉字语音识别(第28期).zip
- 【项目参考】MATLAB火焰识别系统设计(第28期).zip
- 【项目参考】MATLAB家居防火识别系统(第28期).zip
- 【项目参考】MATLAB基于DWT+SVD结合傅里叶变换的数字图像水印水印系统(第28期).zip
- 【项目参考】MATLAB火焰烟雾检测(第28期).zip
- 【项目参考】MATLAB教室人数统计(第28期).zip
- 【项目参考】MATLAB交通道路标识识别(第28期).zip
- 【项目参考】MATLAB金属表面缺陷分析(第28期).zip
- 【项目参考】MATLAB考勤系统设计(第28期).zip
- 【项目参考】MATLAB口罩识别(第28期).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


