

第 卷第 期 吉 林 大 学 学 报 信 息 科 学 版
VolNo
年 月 Journal of Jilin University Information Science Edition July
收稿日期
基金项目国 家 高 科 技 计 划 基 金 资 助 项 目 AAZ 长 安 大 学 中 央 高 校 基 本 科 研 业 务 费 专 用 资 金 资 助 项 目
CHDZY
作者简介杨澜 女陕西咸阳人长安 大学 博 士研 究生主要 从 事姿 态估 计与嵌 入式 控 制研 究 Tel E
mailyanglancom赵祥模 男重庆人长安大学教授博士生导师主要从事 ITS 与分布式网络测控技
术研究 Tel Email xmzhaochdendcn
文章编号
基 于 FPGA 的 车 辆 振 动 信 号 提 取 方 法
杨澜赵祥模惠飞史昕王润民
长安大学 信息工程学院西安
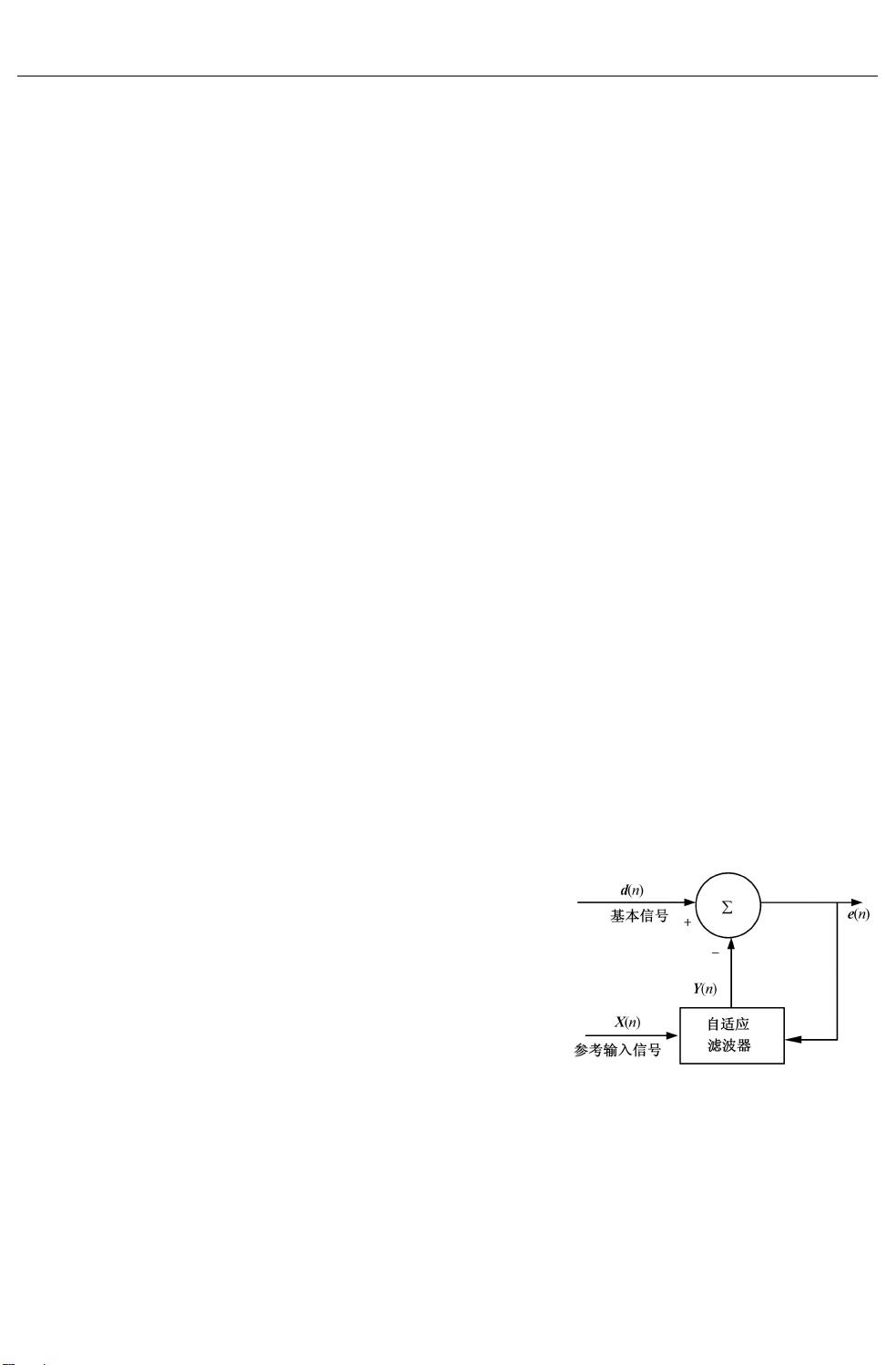
摘要 为了从车辆复杂噪声背景中实时提取陀螺仪的有效振动信号在分析弱信号特征提取方法的基础上针
对自适应滤波算法处理相关信号时收敛速度降低的缺点提出一种适用于 FPGAField Programmable Gata Array
的自适应步长 LMSLeast Mean Square算法 该算法通过建立步长和误差信号相关值之间的非线性关系使步
长仅与输入有用信号相关降低算法对噪声的敏感度 实验以收敛速度和计算复杂度两个指标对该算法与其他
改进算法进行比较并以真实车辆振动信号提取结果分析验证该算法对车载环境噪声和陀螺仪自身噪声都有较
好抑制 在用算法计算基础上以 FPGA 平台提出并实现一种可扩展滤波器结构 设计采用一阶滤波单元重用
方式完成多阶累加计算在目前最大规模 FPGA 芯片上实现 阶滤波器 实验表明该设计充分利用芯片
内逻辑资源处理速度快可靠性高并适用于车辆中低速行驶姿态测量系统
关键词车辆振动信号强背景噪声信号提取LMS 算法变步长FPGA 实现
中图分类号TN 文献标识码 A
Vehicle Vibration Signal Extraction Based on FPGA
YANG LanZHAO XiangmoHUI FeiSHI XinWANG Runmin
School of Information EngineeringChangan UniversityXi
an China
AbstractIn order to obtain the desired signal of dualaxis inclinometer from the complex automotive environ
menta LMSLeast Mean Square algorithm for reducing the convergence speed to process the related data is
presentedit presents a selfadaptation step LMS algorithm by establishing the nonlinear relationship between the
step and the errorso as to the step is interrelated with the true signal for reducing the algorithm sensitivity to
noiseTo cope with the problem of superiority and correctness for applying to the vehicle vibration signal extrac
tionthe learning curves of algorithm are gained by inputting the data with additive white noise of time domainA
comparison of them is made by convergence speed and computation complexity indexThe result shows that the
novel algorithm is reliableThe vehicle acceleration signal extraction experiment shows that it removes the vehicle
environmental impact of the dualaxis inclinometerand restrains its own output noiseBased on the selfadaptive
step LMS algorithmit proposes and implements a scalable FIR Finite Impulse Responsefilter structure on FP
GAField Programmable Gata Array By reusing of fistorder filter unit to complement the multistage cumula
tiveit achieves filter experiments on the largest FPGA chipThe result indicates that the FIR filter structure
full use of chip resourcesprocessing speed highlyreliability highly and apply for the low speed for vehicles atti
tude measurement system
Key words vehicle vibration signalheavy background noisesignal extractionleast mean square LMS algo
剩余7页未读,继续阅读
资源评论













