
978-1-4799-4195-7/14/$31.00©2014IEEE
Imaging Method of FMCW SAR With Diving
Acceleration Based on GPS/IMU Integrated
Navigation Data
De-wei Wu, Ying Liang, Jun-yi Qi, Meng Zhu
Institute of Information and Navigation, Air Force
Engineering University
Xi’an 710077, People’s Republic of China
E-mail: wudewei74609@126.com
You-qing Bai
Institute of Science, Air Force Engineering University
Xi’an 710051, People’s Republic of China
Abstract—This paper presents an imaging method of
FMCW SAR with diving acceleration. The motion parameters
measured by the GPS/IMU integrated navigation device on the
platform are used for constructing the target range expression
in high-order approximation. The
series reversion
algorithm is used to evaluate the accurate expression of
the received signal in Doppler frequency domain.
The
simulation is presented to show the effectiveness of the
proposed method.
Keywords—FMCW SAR; GPS/IMU; diving acceleration;
series reversion algorithm
I. INTRODUCTION
The combination of frequency-modulation continuous-
wave (FMCW) technology and synthetic aperture radar
(SAR) promises a lightweight, cost-effective, and high-
quality imaging sensors [1]. Therefore, the FMCW SAR is
best applied to the small unmanned aerial vehicle (SUAV)
and missile-borne platform [2-3]. In this paper, the issue of
signal characteristic of FMCW SAR during its diving flight
is concerned. The geometric and target range expression are
built, and to ensure the imaging quality, the range
expression need to be constructed as 4-order approximation
about slow-time. The motion parameters measured by the
GPS/IMU integrated navigation device on the platform are
used for motion compensation. Finally, a new imaging
method for FMCW SAR with diving acceleration is
proposed. Simulations are presented to show the
effectiveness of the proposed method.
II. E
CHO SIGNAL MODEL AND IMAGING METHOD
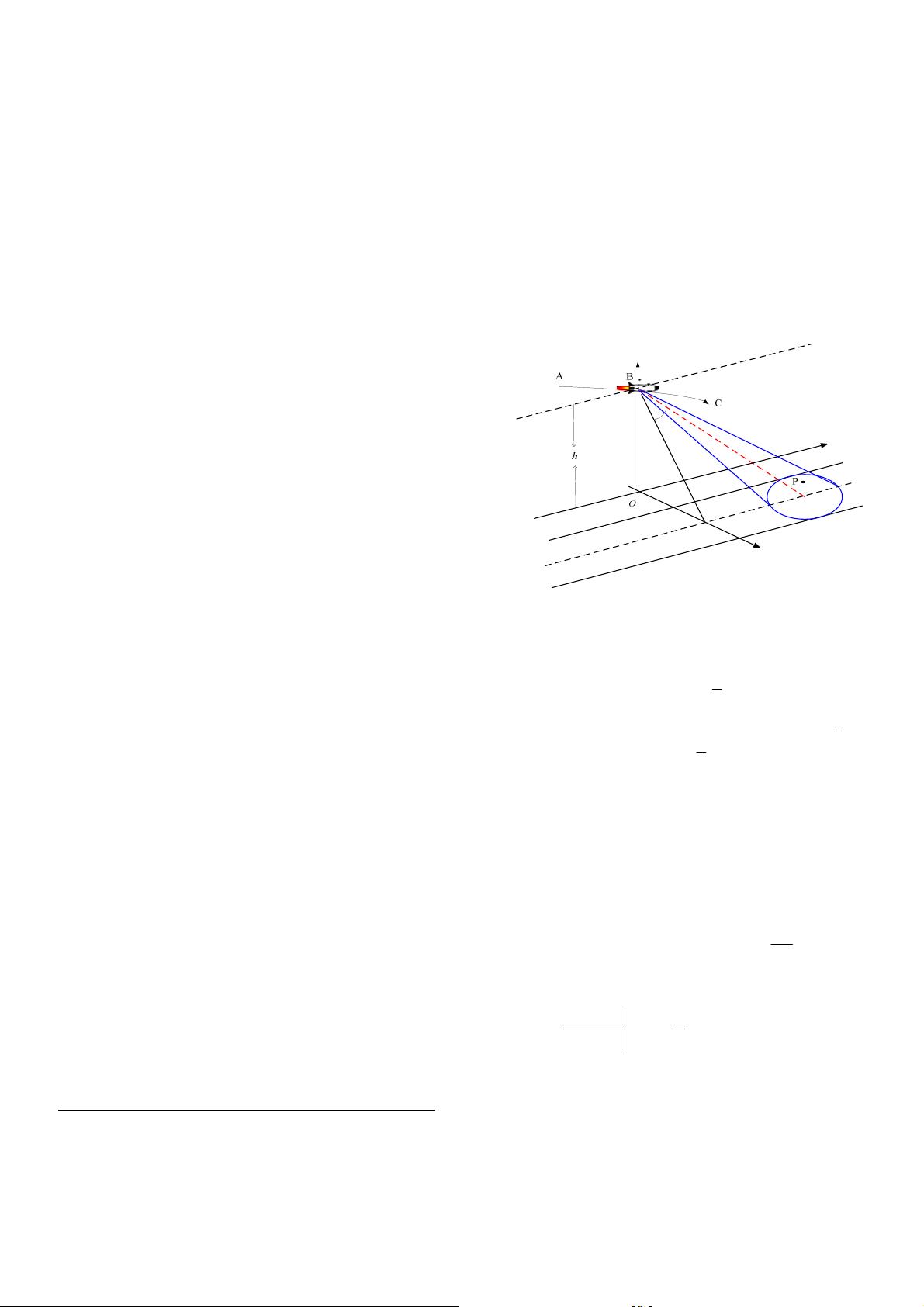
Without loss of generality, the FMCW SAR geometry
with diving acceleration is depicted in Fig.1.
q
A
BC is the
trajectory of the platform, and the projection on the ground
is the X-axis.
()
0, , 0h are the coordinates of B. P denotes
one point target located at the scene with coordinate of
()
00
,,0XY .
B
R
0
R
0
θ
X
Y
Z
Fig. 1. Geometric model of FMCW SAR with diving acceleration
The instantaneous range from P to the radar is
() ( ) ()
()
()
2
2
0
1
2
2
2
2
0
1
,
2
1
2
km x k m x k m
zk m zk m
Rt t X v t t a t t
hvt t at t Y
⎛
⎛⎞
=−+− +
⎜
⎜⎟
⎜
⎝⎠
⎝
⎞
⎛⎞
++ + + + +
⎟
⎜⎟
⎟
⎝⎠
⎠
(1)
where
k
t is the fast time,
m
t is the slow time,
x
v and
x
a are
the velocity and acceleration on the X-axis direction,
z
v and
z
a are the velocity and acceleration on the Z-axis direction.
The velocity and acceleration are measured by the
GPS/IMU integrated navigation device on the platform.
Then (1) can be written in 4-order approximation about
m
t :
()
01 0
0
23 4
234
,sin
z
km x m
mmmk
vh
R
tt R v t
R
tttt
μθ
μμμα
⎛⎞
=+ − +
⎜⎟
⎝⎠
+++ +
(2)
where
()
0
,
2
k
km
a
k
t
dR t t
f
dt
λ
α
=
==−, and
This work is supported by the National Natural Science Foundation of
China under grant 61273048 and 61172169.
资源评论


weixin_38582685
- 粉丝: 4
- 资源: 925









最新资源
- golang语言编程技巧与实践卷一
- AndroidStudio202.735.zip
- 爬虫专栏第三篇:Python 实战:运用 requests 突破京东商品评论获取难题(含 cookie 处理与编码设置技巧
- JAVAWebChat网页聊天室源码数据库 MySQL源码类型 WebForm
- 开源云笔记蚂蚁笔记docker镜像压缩包
- allWebPlugin中间件v2.0.26版本, 它是一款为用户提供安全、可靠、便捷的浏览器插件服务的中间件产品,致力于将浏览器插件重新应用到所有浏览器
- 使用AD证书服务实现安全的企业网站访问实训报告参考
- JAVA基于springBoot智慧停车收费管理系统源码带使用文档数据库 MySQL源码类型 WebForm
- 2018 国赛网络搭建与应用正式赛卷及评分标准.tar.gz
- Python asyncio 的 redis 客户端(支持 redis 服务器、sentinel 和 cluster).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


