
模拟技术中的一种自平衡人形机器人动作控制器的设计和实现模拟技术中的一种自平衡人形机器人动作控制器的设计和实现
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,
成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就
是说,自平衡机器人在静止状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过
一定的控制策略使它达到动态平衡。 由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱
好者设计了多种结构、外观各异的自平衡机器人,尝试采用各种控制策略使其达到自平衡控制。通常这类机器
人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当前机器人姿态控制伺服电机驱动电压的转
向和转速,从而使机器人
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式
机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就是说,自平衡机器人在静止
状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过一定的控制策略使它达到动态平衡。
由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱好者设计了多种结构、外观各异的自平衡机器人,尝
试采用各种控制策略使其达到自平衡控制。通常这类机器人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当
前机器人姿态控制伺服电机驱动电压的转向和转速,从而使机器人保持平衡。该方式制作的自平衡机器人虽然控制性能良好,
但成本高,不适合广泛推广。为解决机器人动作控制而设计的,它将主处理器发出任务处理命令分配到3个16位超低功耗单片
机(MSP430F149)上去执行,实现多层次的控制管理。该人形机器人具有多关节,多自由度,自平衡的控制需求,需要动
作控制器在机器人系统控制中起到关键性的作用。
1 动作控制器的设计动作控制器的设计
1.1 体系结构体系结构
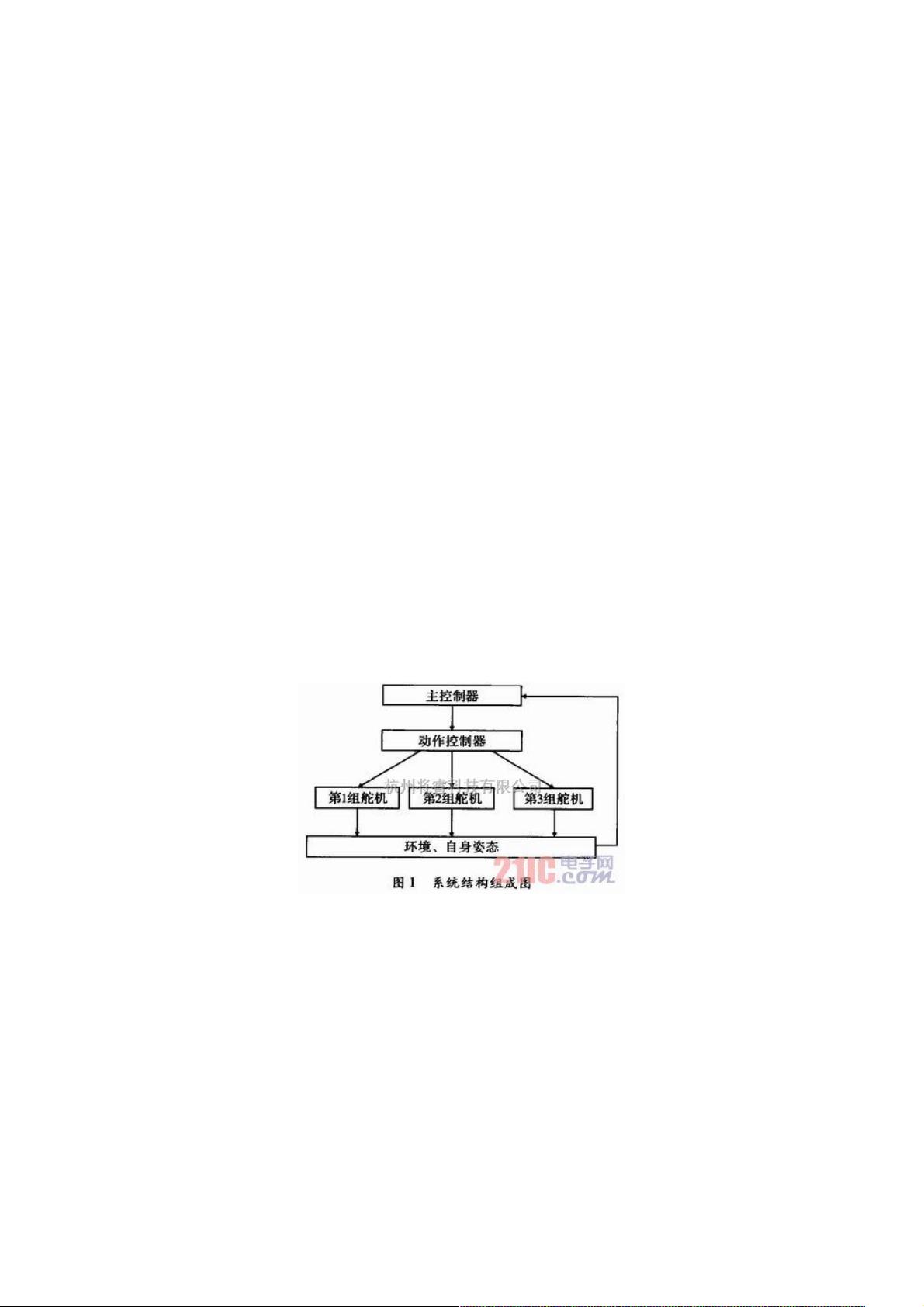
自平衡人形机器人需要获取不可预知的环境信息以及自身姿态信息进行综合运算并及时进行自身姿态的调整。机器人的这
种行为特点决定了机器人的整体控制结构要采用反馈控制。如图1所示,描述了这种反馈控制结构的硬件实现。
同时,在图1中可见从机器人主控制器到执行元件(舵机)之间,有一层动作控制器的结构。这一层结构的任务是实现控
制命令到舵机控制信号之间的功能转换,这种体系结构的设计,就是借鉴计算机系统结构中的分层结构体系思想。采用这种分
层的结构,实现了软件和硬件、命令和动作的相对隔离。其突出的优点体现在能够使主控制器专注于数据的处理,而对下行设
备只负责发送指令,对于硬件的复杂的操作时序,由动作控制器负责产生。
1.2 实现过程实现过程
1.2.1 硬件实现硬件实现
为满足机器人整体控制体系结构中指令到执行的层次性要求,动作控制器需要完成命令解析,信号驱动等任务。如图2描
述了动作控制器内部的结构,其主要由串行总线、3个可并行工作的16位单片机、信号驱动部分构成。这种结构能够从总线接
收命令,单片机进行指令解析并输出控制电信号,外部电路对控制信号驱动放大,从而分别实现对执行舵机的控制。图3为动
作控制器中一个单片机工作模块的硬件原理图。
资源评论


weixin_38558054
- 粉丝: 2
- 资源: 971









最新资源
- 810508989082042视频教程---FPGA---红色飓风FPGA入门教程.zip
- 动态全球网络模型评估地球健康状态的关键因素与措施
- 烘焙效率与均匀加热的优化模型及其实验研究
- ms-python.python-2024.21.2024111501@win32-x64.vsix
- 第11届蓝桥杯省赛单片机类赛事编程题代码免费下载
- 23讲搞定后台架构实战-2.3G网盘下载.txt
- 2014年跨学科建模竞赛(ICM)成果与分析-国际团队参与情况及获奖院校
- 全球环境健康预测的两层通信网络模型构建与应用
- 第14届蓝桥杯省赛单片机类赛事编程题代码免费下载
- 体育教练评估模型基于层次分析法和模糊数学方法的应用
- 交通规划中保持右侧行驶规则对交通流量和安全影响的研究
- 车道变换与超越模型及其对交通安全与流量影响的MATLAB仿真研究
- jyfjgkgkjhkjkjkjkjjkg
- 又一个小商城 litemall = Spring Boot TT + Vue管理员前端 + 微信小用户程序接口 + Vue用户移动端.zip
- 2014数学建模竞赛A题获奖团队名单与成果综述
- 珊瑚白化检测数据集VOC+YOLO格式2870张3类别.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


