基于图像重投影的视图合成 (2010年)
需积分: 13 110 浏览量
2021-05-13
09:46:18
上传
评论
收藏 314KB PDF 举报

第
30
卷第
4
期
2010
年
4
月
计算机应用
Journal of Computer Applications
Vol.
30
No.4
Ap
r.
2010
文章编号:
1001 - 9081
(2010
)04
-
0898
-
04
基于图像重投影的视图合成
刘然
1
,
2
未庆生易琳许小艳
l
(1.重庆大学计算机学院,重庆
400044;
2.
四川虹微技术有限公司,成都
610041;
3
重庆市肿瘤医院,重庆
400030)
(liuran781101@lom.
com)
摘
要:针对摄像机绕光心旋转的情形,讨论了在这种特殊情形下羊应矩阵具有的性质。然后根据这些性质结
合三维图像交换技术给出了一种摄像机绕尤心旋转时新视图的合成方法。该方法首先利用羊应矩阵的性质生成目
标图像的一部分,并采用逆向映射的方法以避免产生空洞;接着利用三维图像变换生成目标图像的剩余部分;最后对
由三维图像交换生成的部分进行空洞填补。实验结果表明,该方法能够生成质量较好的新视图。
关键词:图像处理;视图合成;图像重投影;羊应矩阵;深度图
中图分类号
:T
凹
9
1.
41;TP319
文献标志码
:A
View
synthesis based on image reprojection
LIU
Ran
I
, 2 ,
ZHU
Qi
吨
-sheng
I
,
YI
Lin
3
,
XU
Xiao-yan
I
(1. College
01
Computer Science, Chongqing University, Chongqing 400044, China;
2. Panovasic Technology Company Limited
, Chengdu Sichuan 610041 ,
Chin
α;
3.
Chongqing
Cα
ncer
Hospital, Chongqing 400030,
Chin
α)
Abstract:
What properties the homography should have when the camera rotates around its optical center
was
discussed
Then combining these properties with the 3D image warping technique
, a new
way
to
synthesize novel views when camera
rotates around its optical center
was
proposed. The method first generated part of the novel view by making use of the
properties of the homography
, and backward mapping method
was
used
to
avoid holes; then 3D image warping method
was
applied
to
create the remaining part of the novel view; finally, holes in the remaining part which were caused
by
3D image
warping were filled. Experimental results show that the proposed method provides novel views with quite good image quality.
Key
words:
image processing; view synthesis; image reprojection; homography; depth image
0
引言
随着图像合成技术的发展,基于图像重投影的图像合成
正得到日益广泛的应用。图像重投影是指通过对任意视点的
参考图像进行投影来产生新的图像
[IJ
。由于图像重投影能
够改变己生成的图像的视线方向,因此它已在多视点图像的
实时渲染、视图变形、图像拼接等领域得到了应用
[J
-2J
。目前
多数文献讨论一般情况下的图像重投影,处理起来比较复杂。
本文重点考查当摄像机绕光心旋转时的图像的重投影,首先
讨论了在这种特殊情形下图像重投影单应矩阵具有的性质,
然后根据这些性质结合三维图像变换技术探讨了视图合成的
方法,最后通过实验对该方法进行了验证。
1
单应矩阵及其性质
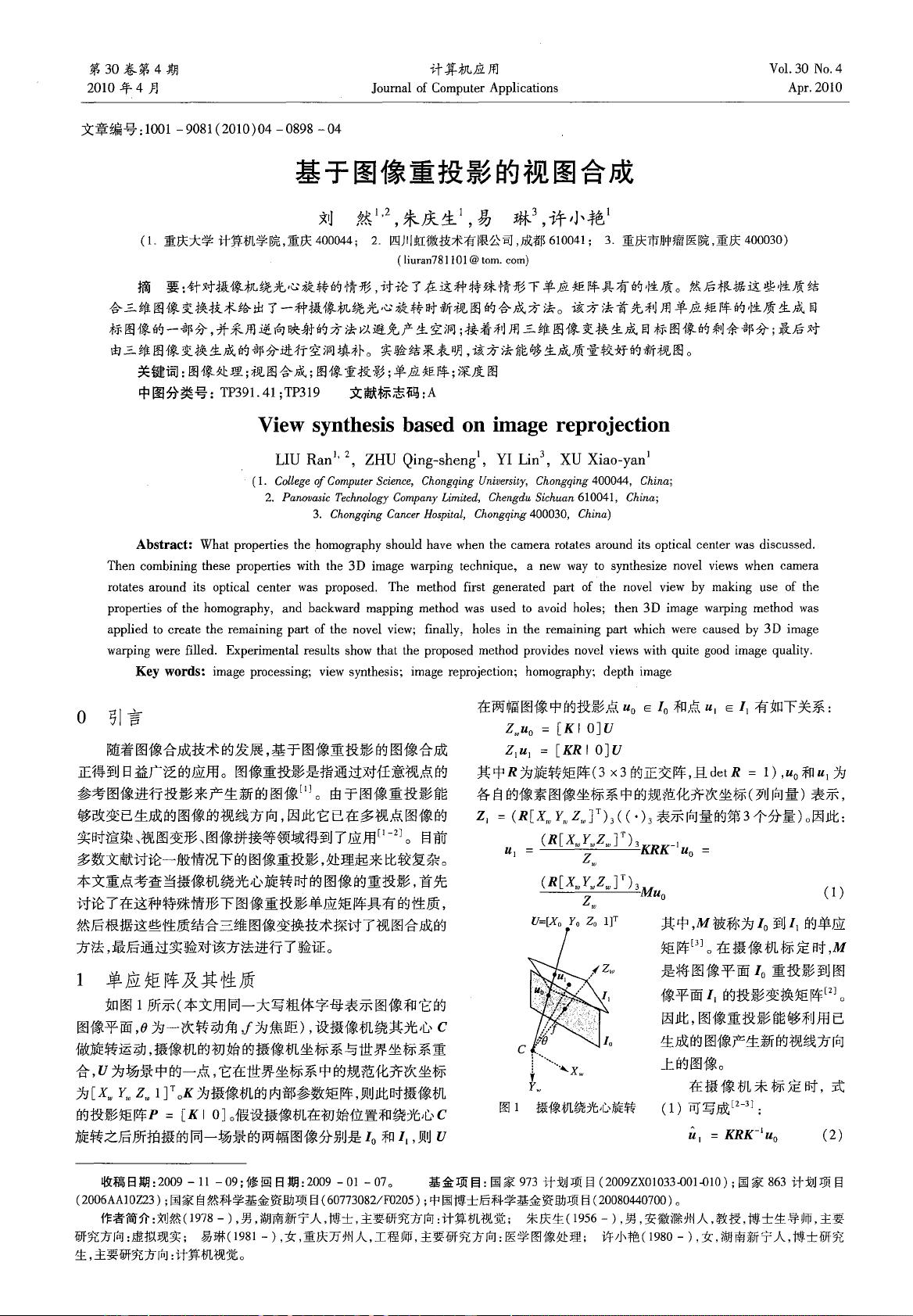
如图
l
所示(本文用同一大写粗体字母表示图像和它的
图像平面
,
B
为一次转动角
J
为焦距)
,设摄像机绕其光心
C
做旋转运动,摄像机的初始的摄像机坐标系与世界坐标系重
合
,
U
为场景中的一点,它在世界坐标系中的规范化齐次坐标
为
[X
w
凡
Zw
lP
oK
为摄像机的内部参数矩阵,则此时摄像机
的投影矩阵
P
=
[K
I
OJ
。假设摄像机在初始位置和绕光心
C
旋转之后所拍摄的同一场景的两幅图像分别是
I
。和矶,则
U
在两幅图像中的投影点
U
o
E
1
,。和点
U
,
E
lJ
有如下关系:
ZwUo
=
[KI
OJU
Z
,U
J
=
[KR
I OJU
其中
R
为旋转矩阵(3仆的正交阵,且
det
R
1)
,
U
。和
U
J
为
各自的像素图像坐标系中的规范化齐次坐标(列向量)表示,
Z, =
(R[X"f
,
J"P)3((')3
表示向量的第
3
个分量)。因此:
(
R[X
,
ω
fwZwf)
3
y, .....TT-l
U ,
AKA
Un
Z
ωU
(
R[X
w
瓦
ZwJT
)
3
.,
lV1Un
Z … U
其中
,
M
被称为
ι
到
1
1
的单应
矩阵
[3J
。在摄像机标定时
,
M
是将图像平面
I
。重投影到图
像平面孔的投影变换矩阵
[2J
。
因此,图像重投影能够利用已
生成的图像产生新的视线方向
上的图像。
在摄像机禾标定时,式
、、、.,,,,
1
(
图
1
摄像机绕光心旋转
(1)可写成
[2-3J
û, =
KRK-
1
u
O
(2)
收稿日期
:2009
-11
-09;
修国日期:
2009 -
01
-
07
0
基金项目:国家
973
计划项目(
2009
ZXO
1033
-0
01
-0
10
)
;国家
863
计划项目
(2006AA
lO
Z23)
;国家自然科学基金资助项目(
60773082/F0205 )
;中国博士后科学基金资助项目(
20080440700
)。
作者简介:刘然(1
978
- )
,男,湖南新宁人,博士,主要研究方向·计算机视觉;
朱庆生(
1956
一),男,安徽派州人,教授,博士生导师,主要
研究方向:虚拟现实;
易琳(1
981
- )
,女,重庆万州人,工程师,主要研究方向:医学图像处理;
许小艳
(1980
- )
,女,湖南新宁人,博士研究
生,主要研究方向:计算机视觉。






评论0
最新资源