基于低功耗嵌入式系统的车牌定位算法
62 浏览量
2020-10-16
09:06:41
上传
评论
收藏 476KB PDF 举报

基于低功耗嵌入式系统的车牌定位算法基于低功耗嵌入式系统的车牌定位算法
文章给出了自行设计的在低功耗嵌入式平台上实现车牌定位检测的算法。首先通过Sobel水平算子对车牌图像进
行垂直边缘检测,运用形态学方法对边缘图像进行闭运算得到连通图块。然后根据连通区域轮廓确定最小外接
矩形,解决车牌位置断节问题,得到车牌候选区域。最后根据车牌特征对提取出的车牌候选区域进行筛选实现
准确的车牌定位。实验结果证明了该算法的有效性,而且在复杂背景下也具有较好的鲁棒性和自适应性。
李震,唐莉萍
(东华大学 信息科学与技术学院,上海 201620)
摘要摘要:文章给出了自行设计的在低功耗嵌入式平台上实现车牌定位检测的算法。首先通过Sobel水平算子对车牌图像进行
垂直边缘检测,运用形态学方法对边缘图像进行闭运算得到连通图块。然后根据连通区域轮廓确定最小外接矩形,解决车牌位
置断节问题,得到车牌候选区域。最后根据车牌特征对提取出的车牌候选区域进行筛选实现准确的车牌定位。实验结果证明了
该算法的有效性,而且在复杂背景下也具有较好的鲁棒性和自适应性。
关键词关键词:车牌定位;Sobel算子;形态学;闭运算
中图分类号中图分类号:TP391.41文献标识码:ADOI: 10.19358/j.issn.1674-7720.2017.03.014
引用格式 引用格式:李震,唐莉萍.基于低功耗嵌入式系统的车牌定位算法[J].微型机与应用,2017,36(3):45-48,58.
0引言引言
在大型停车场的出入口和停车智能收费场所都装有摄像头,对进出场所的车辆进行图像拍摄,以获取车辆的车牌号。对含
有车辆的图像进行车牌识别是车辆收费管理系统的一个重要环节。在车牌识别中,要实现字符的正确分割和识别,首先需要完
成对车辆车牌的精确定位。车牌定位的精度直接影响监控系统的性能[1]。多数收费管理系统采用的方案是摄像头加PC,由
摄像头采集图像,由PC通过图像处理算法得到车牌号。这种方法不易实现活动场所的车牌识别。因此基于嵌入式平台的移动
车牌识别成为一个新的研究热点。目前主流的嵌入式平台有三种:ARM平台、DSP平台和FPGA平台。
基于ARM平台主要使用ARM9、ARM11或者CortexA8处理器,例如文献[2]用三星的ARM9芯片读取CMOS摄像头采
集的车辆图像进行车牌区域判断;文献[3]将CortexA8芯片运行于Linux操作系统,并借助于OpenCV图形图像处理库中成
熟的函数实现车牌的定位;张海霞选择ARM11开发板(S3C6410为微处理器核心)作为嵌入式车牌识别系统的核心硬件电路
[4]。基于DSP平台的主流处理器是德州仪器TMS系列,例如左宗鹏等人采用TMS320DM642读取SAA7113采集的图像数
据,通过改进的BP神经网络算法实现车牌定位和识别[5]。基于FPGA平台的内核是定制的软核处理器,如郑存芳等人用
FPGA通过定制的Nios Ⅱ软核调用接口读取CCD摄像头的图像数据,运用边缘检测方法进行车牌定位[6];郑存芳对比基于
PC或DSP的车牌识别系统,提出了基于FPGA的车牌识别系统研究与实现方案[7]。还有研究人员将FPGA和DSP结合在一
起实现车牌识别[8]。
以上文献给出的嵌入式平台,硬件平台采用的处理器大多为中高端产品,产品的投入成本较高。在软件方面有的需要运行
在特定的操作系统,有些需要借助特殊的图形图像处理软件,将会引起处理器内存开销过大,影响系统的运行速度。本文研究
将低端、低功耗嵌入式处理器引入移动车牌识别系统,无需操作系统,通过对相关图像处理算法进行改进,直接在硬件电路中
完成车牌定位,为后续字符的正确分割和识别提供保障。
1系统组成系统组成
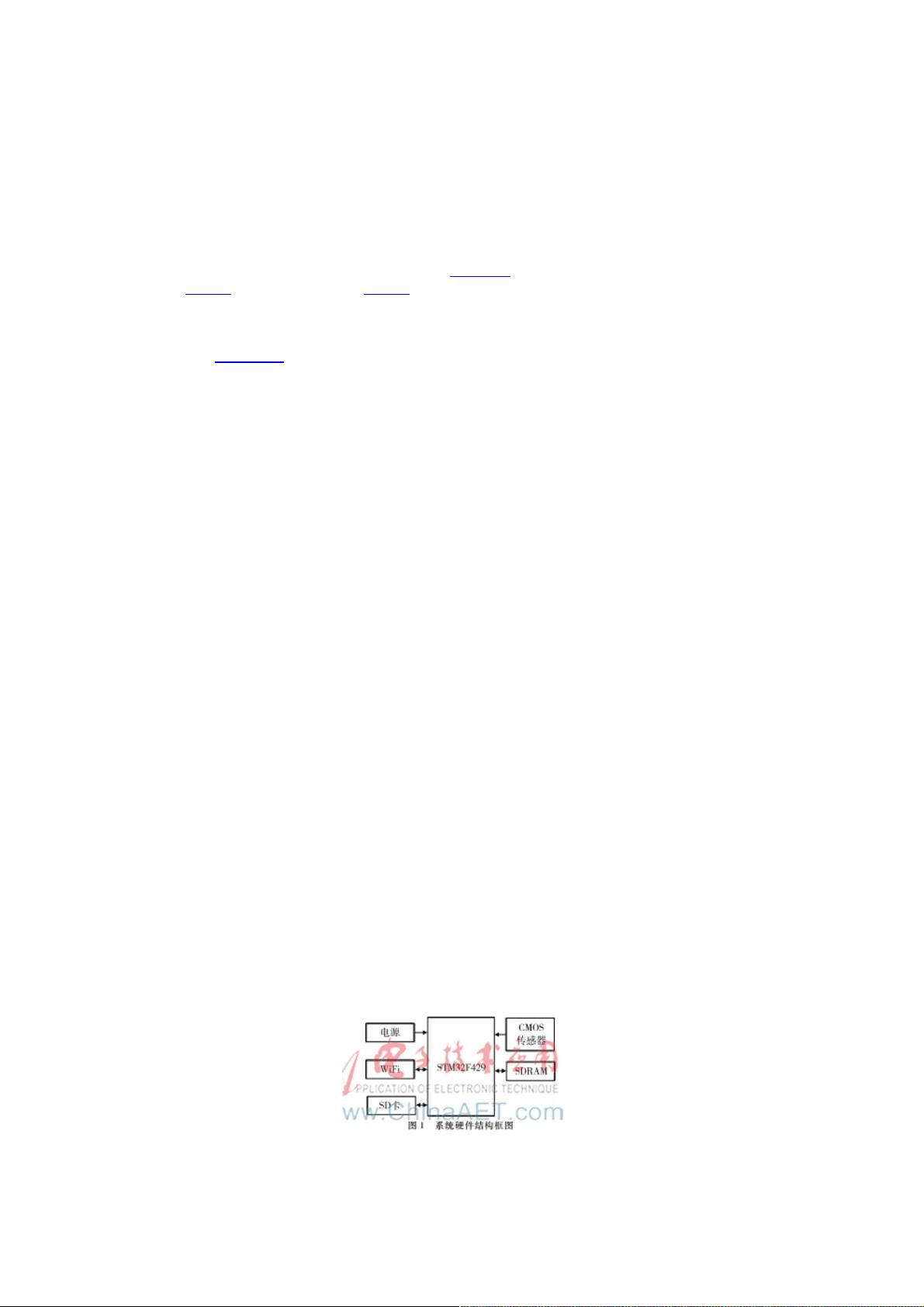
本系统采用Aptina公司的MT9P031 CMOS传感器作为图像采集器件,这种传感器具有高分辨率、高帧率、与处理器接口
简单的特点。图像有效像素为500万,在全分辨率条件下帧率为14帧/s,在640×480像素下的帧率可达50帧/s,与处理器连接
仅需要两线串行接口。主控处理器选用意法半导体公司的STM32F429ZGT6,其内核为CortexM4,最高主频达180 MHz,内
存容量为256 KB,自带8~14位并行Camera接口,传输速率为54 Mb/s。系统要在硬件中直接对图像进行各种处理,需要足够
的内存交换数据,因此增加64 KB外部存储器件SDRAM。为了能保存历史数据,硬件部分预留了SD卡接口。根据移动车牌识
别的特点,系统与上位机采用WiFi通信模式。系统采用锂电池供电,当检测的图像不变时,系统自动进入休眠状态,每200
ms自动唤醒一次。若检测到图像有变化时,立即执行图像处理算法,这样可以有效降低移动车牌识别的系统功耗。硬件系统
框图如图1所示。
2定位算法定位算法
车牌定位是从一张拍摄到的图像中定位出车牌的位置,并提取出车牌图像。由于CortexM4的硬件资源有限,要求算法的
复杂度不能太高。为了保证定位算法的实时性,需要对CMOS传感器采集到的图像进行截取,在含有车辆运动的全景图像中,
截取640×480像素的车辆目标图像作为目标车辆的最佳区域,再在该区域进行车牌定位。定位算法包括以下几个步骤:






评论0
最新资源