嵌入式系统/ARM技术中的基于ARM的多路同步的A/D和D/A设计
9 浏览量
2020-10-20
02:55:53
上传
评论
收藏 216KB PDF 举报

嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于ARM的多路同步的的多路同步的A/D和和D/A设设
计计
导读:本文将介绍一种基于ARM的高精度多路同步的数据采集与输出控制系统的设计方法。本设计选用德州仪
器公司生产的AD芯片ADS8556和DA芯片DAC8574,分别采用SPI接口和IIC接口与ARM9芯片S3C2440连接,阐
明其硬件设计与软件设计方法。系统可实现多路且同步、高速高精度的数据采集与输出控制功能。 ARM处
理器是一种32位精简指令集RISC微处理器,片内集成了丰富的硬件资源,广泛的应用于许多嵌入式系统中。
S3C2440是一款基于ARM920T内核的32位RISC嵌入式处理器,运行主频可达400MHz.本文阐述选用S3C2440
处理器设计的一种同步、高速、高精度、多通道的数据采
导读:本文将介绍一种基于导读:本文将介绍一种基于ARM的高精度多路同步的数据采集与输出控制系统的设计方法。本设计选用德州仪器公司生产的的高精度多路同步的数据采集与输出控制系统的设计方法。本设计选用德州仪器公司生产的
AD芯片芯片ADS8556和和DA芯片芯片DAC8574,分别采用分别采用SPI接口和接口和IIC接口与接口与ARM9芯片芯片S3C2440连接,阐明其硬件设计与软件设计方连接,阐明其硬件设计与软件设计方
法。系统可实现多路且同步、高速高精度的数据采集与输出控制功能。法。系统可实现多路且同步、高速高精度的数据采集与输出控制功能。
ARM处理器是一种32位精简指令集RISC微处理器,片内集成了丰富的硬件资源,广泛的应用于许多嵌入式系统中。
S3C2440是一款基于ARM920T内核的32位RISC嵌入式处理器,运行主频可达400MHz.本文阐述选用S3C2440处理器设计的
一种同步、高速、高精度、多通道的数据采集与信号输出系统的设计方法。
1 多路同步多路同步A/D设计设计
1.1 ADS8556的功能
系统选用TI公司生产的16位6路同步逐次逼近型模数转换芯片ADS8556.输入模拟信号电压范围为-12V~+12V.常规应用下
功耗为251.7mW,最大功耗为298.5mW,信噪比可达91.5dB.ADS8556芯片内部包含6个独立的采样保持模块和对应的6个独立的
模数转换模块,可实现对6路信号的同时同步的模数转换。ADS8556工作模式分为硬件模式和软件模式,本设计采用硬件模
式。在硬件模式下ADS8556的功能设置(如每对通道的转换使能、参考电压选择等)都是通过对相关引脚设置高低电平实现
的。ADS8556支持并行和串行接口方式,本设计采用串行SPI接口与S3C2440连接。采用串行接口的优点是节约S3C2440的
引脚资源,S3C2440绝大多数引脚是功能复用的,若采用并行接口会占用其16个I/O引脚资源。
ADS8556具有3个串行数据输出端口SDO_A、SDO_B、SDO_C,转换结果通过端口使能可选择这3个串行端口中的1个、2
个或3个工作。当3个端口都选用工作时,每个串行端口上输出对应2路每路16位共32位的转换结果,输出时间需要32个时钟
周期,每路最大采样率可达450kS/s.当选择2个串行端口时,每个端口输出3路共48位转换结果,输出时间需要48个时钟周
期,每路最大采样率可达375kS/s.由于S3C2440只有2个SPI串行接口,所以至多选择ADS8556的2个串行输出端口与其连
接。
1.2 ADS8556与S3C2440接口电路设计
本设计选用ADS8556的1个SPI串行输出端口SDO_A与S3C2440的1个SPI接口SPI0连接,SDO_A端口输出全部6路共96
位转换结果,输出时间需要96个时钟周期,每路最大采样率可达250kS/s.SPI串口以主从方式工作,S3C2440作为主
机,ADS8556作为从机,需要4根或3根线连接,3根用于单向传输,4根连接线分别是MOSI(主机输出/从机输
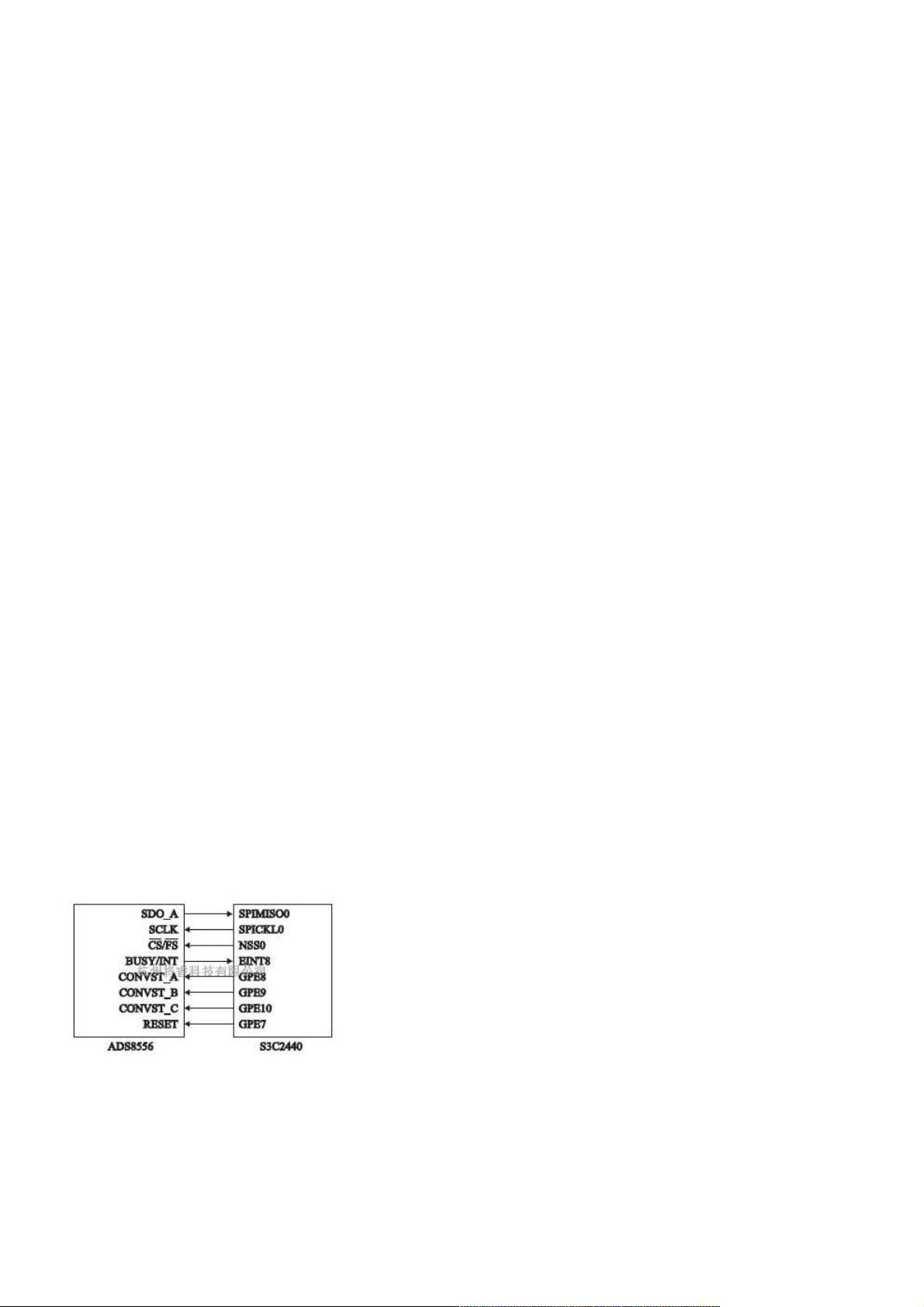
入),MISO(主机输入/从机输出),SCLK(时钟信号),CS(片选使能),连接方式如图1所示。其中SPI0接口只用了3
根连接线SPIMISO0、SPICLK0和NSS0,未使用SPIMOSI0,这是由于本设计选择ADS8556工作于硬件模式,S3C2440没有给
ADS8556输入数据,其功能的设置(如每对通道的转换使能、参考电压选择等)都是通过对相关使能引脚设置高低电平实现
的。若在软件模式下,这些功能的选择是由S3C2440通过SPIMOSI对ADS8556内部相应寄存器进行赋值实现的,此时其相关
使能引脚均接地。
图1 ADS8556与S3C2440接口连接示意图
1.3 ADS8556的接口程序设计
S3C2440作为主机,ADS8556作为从机,程序中要对S3C2440的SPI串行端口进行初始化设置,表1所示为相关引脚配
置。
表1 ADS8556与S3C2440的接口引脚配置
资源评论


weixin_38518958
- 粉丝: 0
- 资源: 883









最新资源
- 论文(最终)_20240430235101.pdf
- 基于python编写的Keras深度学习框架开发,利用卷积神经网络CNN,快速识别图片并进行分类
- 最全空间计量实证方法(空间杜宾模型和检验以及结果解释文档).txt
- 5uonly.apk
- 蓝桥杯Python组的历年真题
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 前端开发技术实验报告:内含4四实验&实验报告
- Highlight Plus v20.0.1
- 林周瑜-论文.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


