
基于基于FPGA的短基线水声定位接收机设计的短基线水声定位接收机设计
设计了基于FPGA器件的数字声纳接收机,实现水声短基线定位系统的多通道数字正交接收,有效地降低了系统
设计的复杂度和成本。该系统可应用于水下航器的定位和轨迹测量等领域。实验分析表明,通过此系统可实现
精确的水下目标定位和轨迹测量,定位精度达到5‰±10 cm。
在进行船舶、潜艇等航器的设计工作过程中,需要对航模进行各种水池试验工作。在试验水池中对航模进行航迹测量时,
在雷达、无线电领域,全数字化接收机概念的提出受到了普遍的关注,随着电子技术的进步,以大规模可编程逻辑器件(
本文通过使用大规模可编程逻辑器件作为核心的短基线定位系统接收机实现多通道信号的接收和处理,有效地降低系统设
计的复杂度和成本,从而实现了一套高精度的短基线水声定位系统,并成功地应用于某研究所的航模试验。
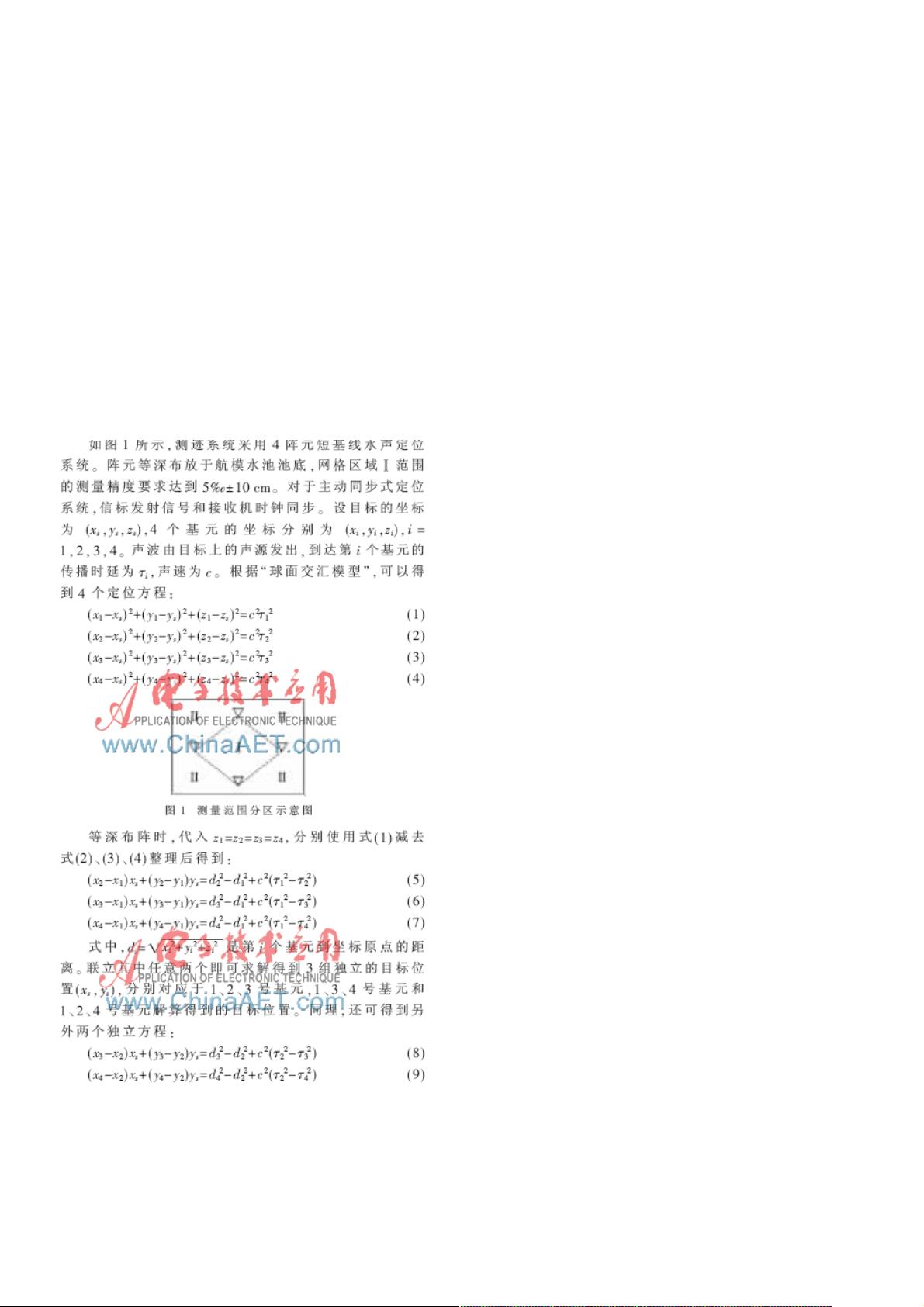
1 同步短基线定位原理同步短基线定位原理
水声定位是通过测量目标声信号从发射到基阵接收所经历的时延来测量声源到各个基元的距离,然后通过平面或者球面相
交即可测量和确定目标相对于基阵的方位。
根据目标声信号的不同,水声定位系统区分为目标携带声信标的主动定位测距和不携带声信标的被动定位测距;根据声信
标时间测量方式的不同,分为同步定位和异步定位。
对于主动同步定位系统,通过在目标上安装高精度的同步时钟并与接收机内部同步时钟进行时钟同步,可以确知目标发射
信号的时间。在测量过程中,经接收机测出信号从发射到接收所经历的时间并联合声速即可确定目标相对于接收基阵的空间位
置。同步方式可以使系统达到很高的精度,但同步误差会随时间累积逐渐增大,因此长时间定位时精度不高。随着高精度恒温
晶振的技术发展,在有限时间内的时钟误差较小,完全可以满足航模试验的要求。
联立这两个方程,即可得到2、3、4号基元解算对应的目标位置。为了提高测量精度,将每三个阵元的合围区域定义为一个
象限,当目标位于两个子阵的象限重叠区域时,将两个子阵的测量结果进行判别处理,以提高测量精度,同时也有利于减少偶
然误差的影响。
得到目标位置(xs,ys)后,代入式(1)中,即可得到两个目标深度解,其关于基元深度z1对称。由于基元布放深度比航模要
深,此时选取zs<z1的解即是正确的目标深度。
2 短基线定位系统原理及电路设计短基线定位系统原理及电路设计
定位系统主要由三个部分组成:(1)信标发射机;(2)定位接收机;(3)计算机显控平台。其各组成部分的功能如图2所示。






评论0
最新资源