

CY7C63722C
CY7C63723C
CY7C63743C
enCoRe™ USB Combination Low-Speed
USB and PS/2 Peripheral Controller
Cypress Semiconductor Corporation • 198 Champion Court • San Jose, CA 95134-1709 • 408-943-2600
Document #: 38-08022 Rev. *E Revised April 15, 2011
Features
■ enCoRe™ USB - enhanced Component Reduction
❐ Internal oscillator eliminates the need for an external crystal
or resonator
❐ Interface can auto-configure to operate as PS/2 or USB with-
out the need for external components to switch between
modes (no General Purpose I/O [GPIO] pins needed to man-
age dual mode capability)
❐ Internal 3.3V regulator for USB pull-up resistor
❐ Configurable GPIO for real-world interface without external
components
■ Flexible, cost-effective solution for applications that combine
PS/2 and low-speed USB, such as mice, gamepads, joysticks,
and many others.
■ USB Specification Compliance
❐ Conforms to USB Specification, Version 2.0
❐ Conforms to USB HID Specification, Version 1.1
❐ Supports one low-speed USB device address and three data
endpoints
❐ Integrated USB transceiver
❐ 3.3V regulated output for USB pull-up resistor
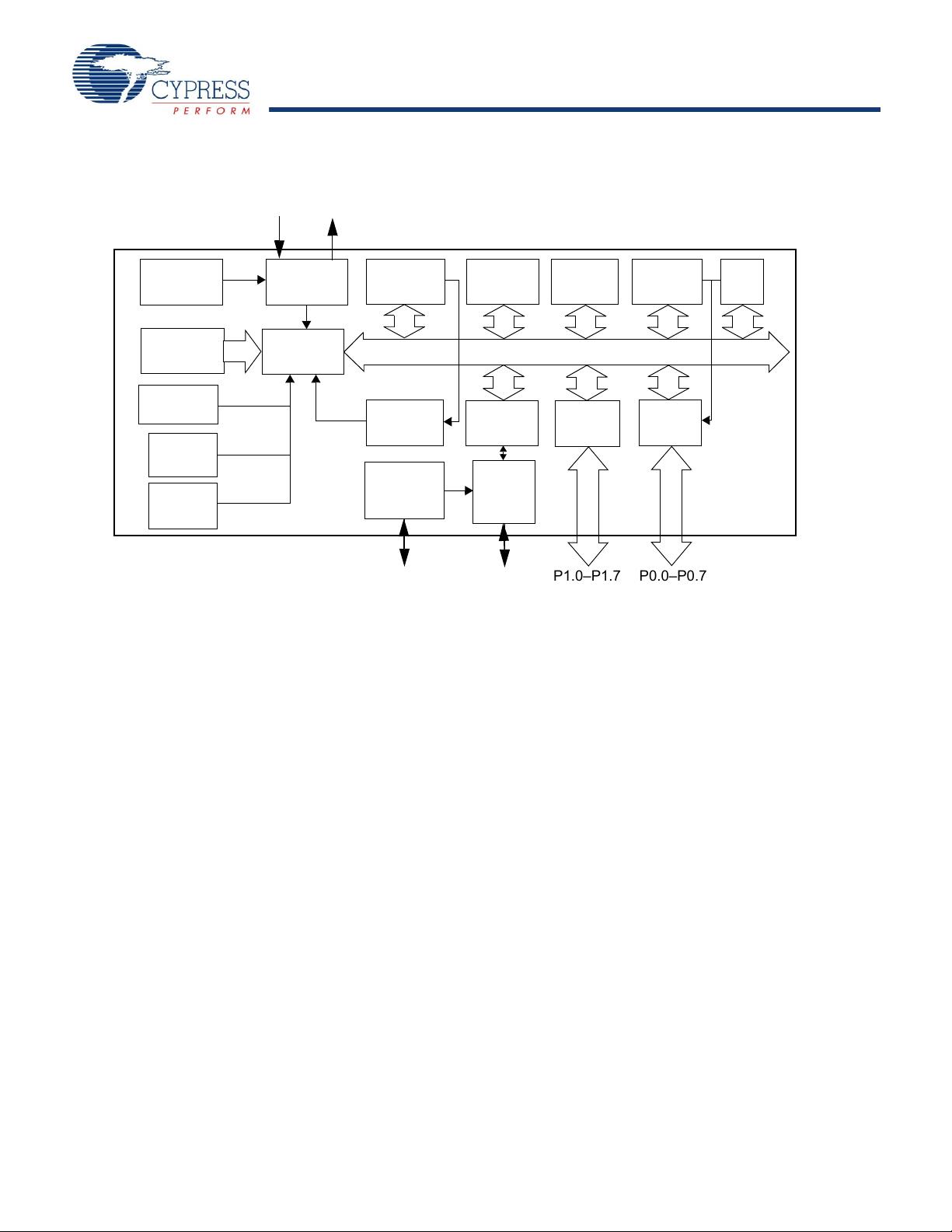
■ 8-bit RISC microcontroller
❐ Harvard architecture
❐ 6-MHz external ceramic resonator or internal clock mode
❐ 12-MHz internal CPU clock
❐ Internal memory
❐ 256 bytes of RAM
❐ 8 Kbytes of EPROM
❐ Interface can auto-configure to operate as PS/2 or USB
❐ No external components for switching between PS/2 and
USB modes
❐ No GPIO pins needed to manage dual mode capability
■ I/O ports
❐ Up to 16 versatile GPIO pins, individually configurable
❐ High current drive on any GPIO pin: 50 mA/pin current sink
❐ Each GPIO pin supports high-impedance inputs, internal
pull-ups, open drain outputs or traditional CMOS outputs
❐ Maskable interrupts on all I/O pins
■ SPI serial communication block
❐ Master or slave operation
❐ 2 Mbit/s transfers
■ Four 8-bit Input Capture registers
❐ Two registers each for two input pins
❐ Capture timer setting with five prescaler settings
❐ Separate registers for rising and falling edge capture
❐ Simplifies interface to RF inputs for wireless applications
■ Internal low-power wake-up timer during suspend mode
❐ Periodic wake-up with no external components
■ Optional 6-MHz internal oscillator mode
❐ Allows fast start-up from suspend mode
■ Watchdog Reset (WDR)
■ Low-voltage Reset at 3.75V
■ Internal brown-out reset for suspend mode
■ Improved output drivers to reduce EMI
■ Operating voltage from 4.0V to 5.5VDC
■ Operating temperature from 0°C to 70°C
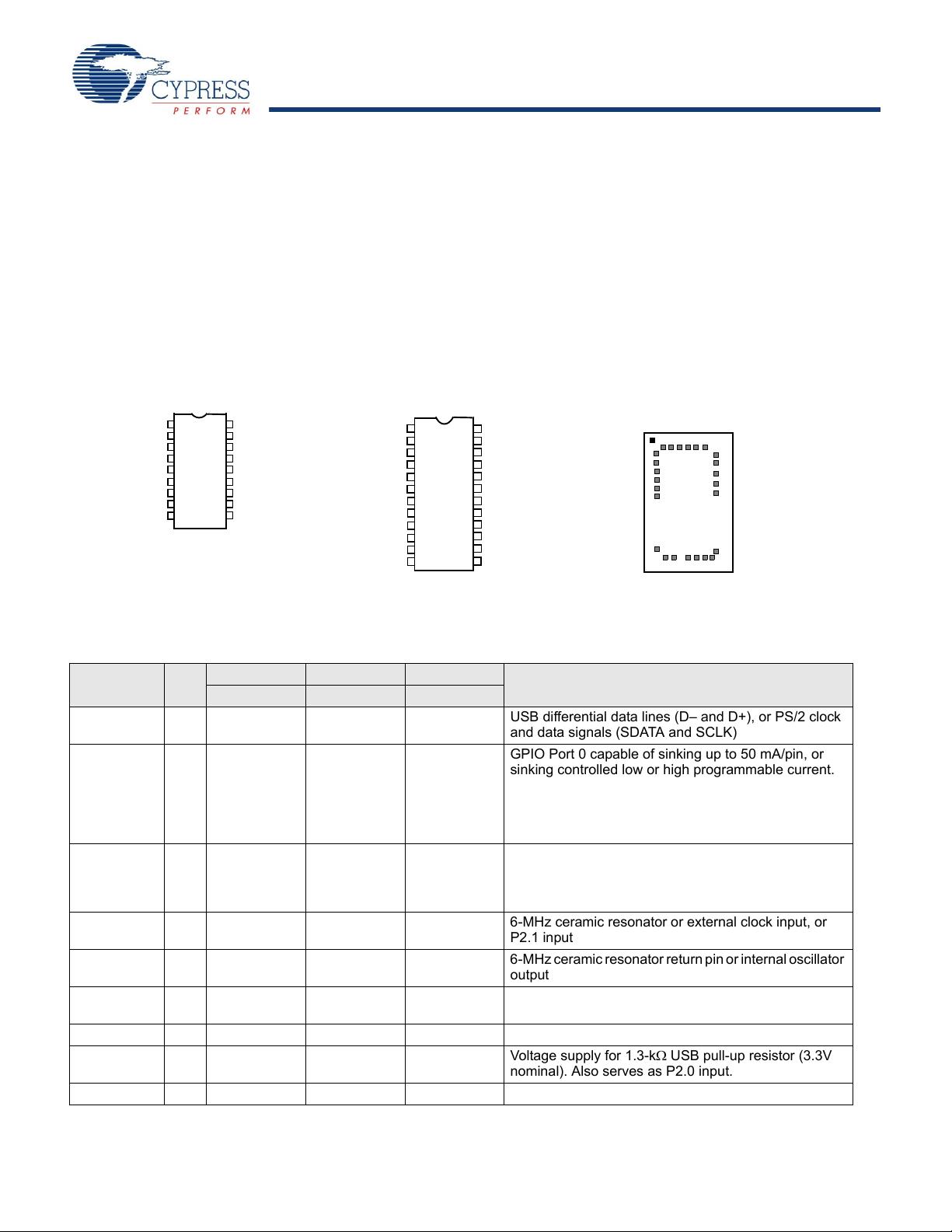
■ CY7C63723C available in 18-pin SOIC, 18-pin PDIP
■ CY7C63743C available in 24-pin SOIC, 24-pin PDIP, 24-pin
QSOP
■ CY7C63722C available in DIE form
■ Industry standard programmer support
[+] Feedback

剩余52页未读,继续阅读
资源评论


走在茫然的路上
- 粉丝: 0
- 资源: 1









最新资源
- 三菱FX3U PLC与台达变频器通讯:Modbus RTU协议下的昆仑通态触摸屏控制程序详解,三菱FX3U与台达变频器通讯 器件:三菱FX3U PLC+FX3U 485BD板,台达VFD变频器,昆仑
- 源荷协同优化的低碳性挖掘:运用多时间尺度调度克服碳捕集电厂局限,基于matlab+cplex仿真平台,提升系统低碳性能,内容:挖掘源荷两侧低碳资源并分析其低碳性,荷侧调用不同响应速度的价格型、激励型需
- mongodb可视化工具(兼容较低版本使用)
- 三相异步电机Simulink仿真:中南大学与山河智能合作开发电动叉车高实用性仿真模型与文献分享,三相异步电机simulink仿真 中南大学与山河智能合作开发电动叉车的校企合作项目的仿真模型,感应电机F
- 新时达软件上位机:全协议支持,解除限制,灵活设置运行,电脑调试系统便捷高效,新时达软件上位机,256全协议,007软件 能解除主板限制,能解除轿厢锁 能人为设置运行限制 新时达电脑调试软件多协议,方便
- Comsol光栅波导耦合器:高效耦合效率计算与经典复古小案例,Comsol光栅波导耦合器,耦合效率计算 经典复古小案例 ,核心关键词:Comsol光栅波导耦合器; 耦合效率计算; 经典复古; 小案
- 文件批量重命名工具.exe
- linux系统下安装sysstat以及依赖的cpp
- 半挂汽车列车横向稳定性控制研究:低附路面下的三工况仿真分析与模糊PID等算法应用基于Trucksim与Simulink联合仿真参考论文,半挂汽车列车4自由度6轴整车model,横向稳定性控制,在低附着
- 基于动态粒子群算法的动态环境寻优算法:随机初始化粒子群,适应度评价搜索最优解,Matlab基于动态粒子群算法的动态环境寻优算法 基本粒子群算法首先是在解空间中随机初始化所有粒子,每个粒子位置即代表问题
- 双碳背景下基于Matlab的综合能源系统低碳优化调度策略研究:涉及新能源消纳等多元素综合优化分析,双碳+24小时分时综合能源系统低碳优化调度(用Matlab+Yalmip+Cplex) 包含新能源消纳
- 参考资料-治理环境、企业寻租与交易成...公司非生产性支出的经验证据.pdf
- [整站程序]LDU v702汉化版_ldu702hh.rar
- 基于lunwen的四永磁同步电机相邻耦合转速同步控制Simulink仿真模型优化与二次开发建议,根据lunwen搭建的四永磁同步电机相邻耦合转速同步控制simulink仿真模型 采用的是PI算法跟随
- Java + LibreOffice + Excel转换为PDF + 工具类
- [整站程序]MyTopix v1.3.0简体中文版_mytopix_v_130.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


