智能车控制系统1
需积分: 0 176 浏览量
2022-08-04
00:14:36
上传
评论
收藏 1.3MB PDF 举报


基于树莓派的智能车运行控制系统
南京大学软件学院 冯国豪
关键词:嵌入式;控制系统;自动寻迹;web
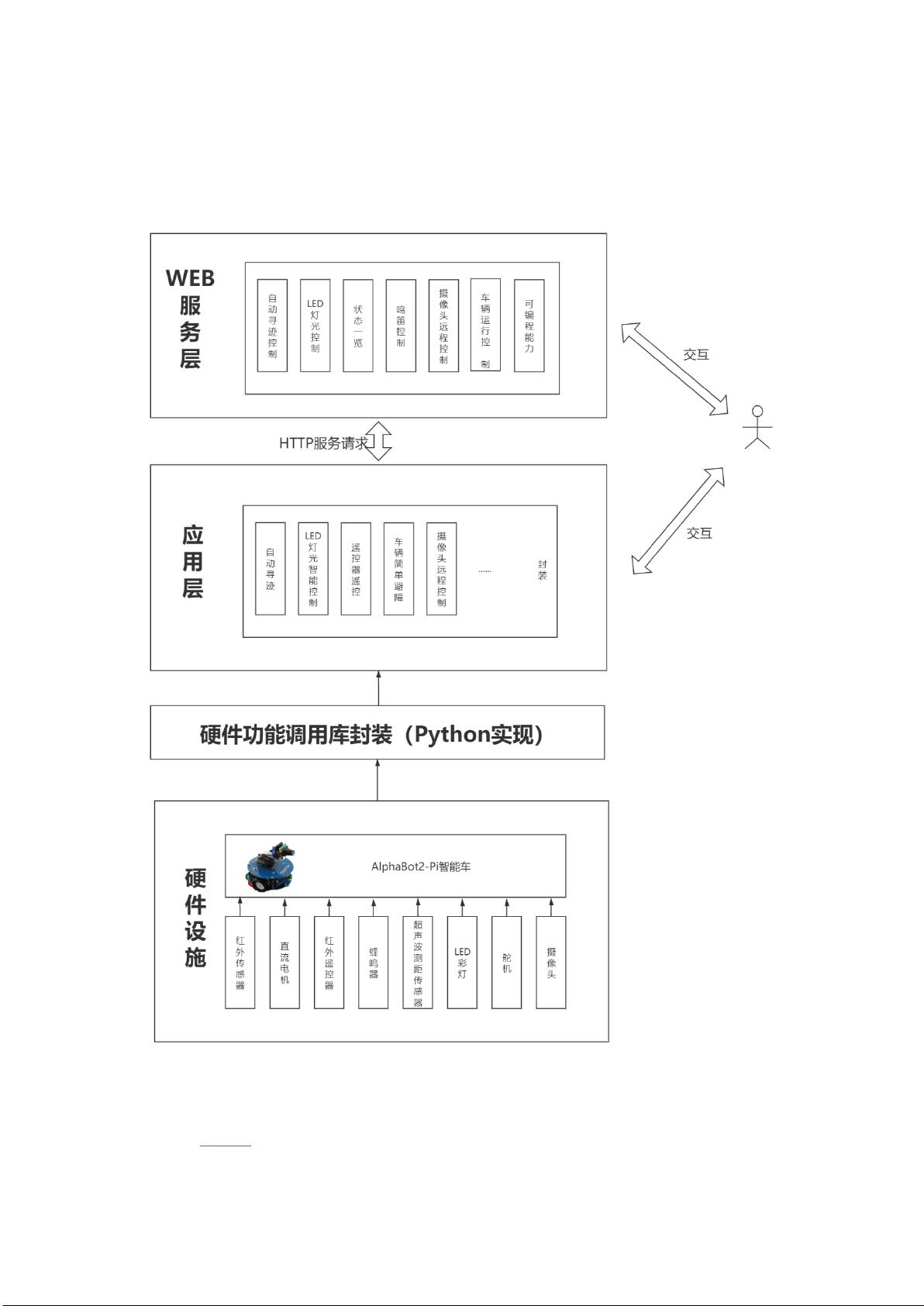
摘要:本文介绍了基于树莓派开发的智能车控制系统。该系统基于智能车硬件实现了其上的
调用库,并基于调用库开发了上层应用,可以实现自动寻迹、简单避障、摄像头控制、小车
遥控等等功能,系统还实现了 web 用户界面,可以使用网页对小车进行控制。
一、概述
树莓派是一种为计算机编程教育设计的卡片式计算机,具有体积小,非常容
易集成在其他硬件设备之中;提供大量的硬件设施和接口;提供简单易用的
Linux 操作系统;能够使用高级编程语言在其上进行编程工作等优点,非常适合
用来开发嵌入式系统,控制硬件设备行为,进而为用户提供高可用的服务。
本文便介绍了基于树莓派开发的智能车运行控制系统,该系统基于微雪电子
公司生产的 AlphaBot2-Pi 智能车设备,使用 Python 语言作为开发语言,基于车
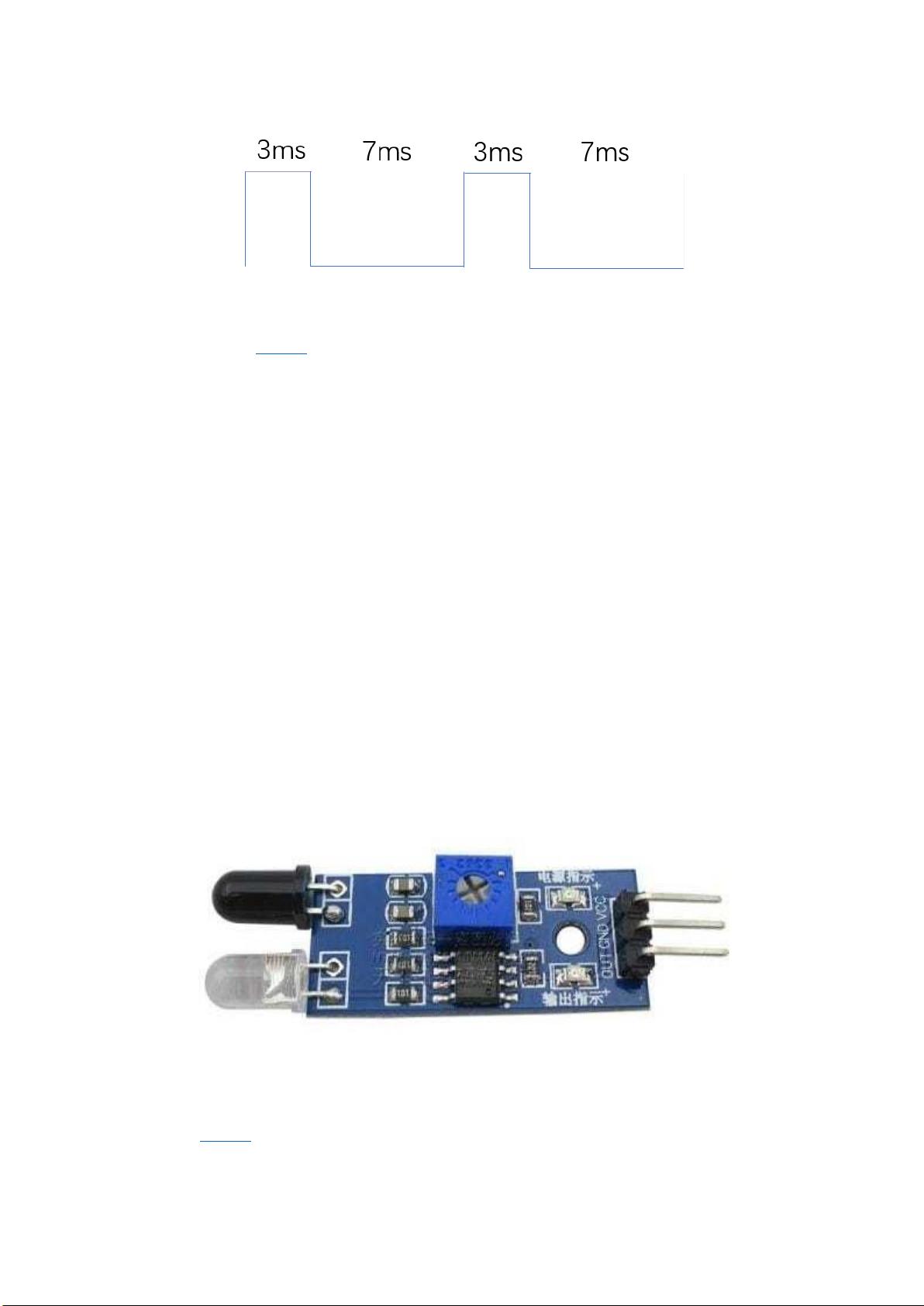
上提供的红外传感器、马达、蜂鸣器、超声波距离传感器等硬件设备能力开发了
对应的调用库,并基于硬件基础设施调用库开发了上层应用,可以实现自动寻迹、
LED 灯光的智能控制、遥控器遥控控制车辆、车辆简单避障、摄像头的远程控制
等功能,并进行了一定的封装集成,最后还基于 Vue.js 与 Python 的 web 开发框
架 Flask 实现了简单易用的 web 用户界面,能够基于 web 服务使客户端同车辆进
行通信,进行小车功能的控制。同时,系统还提供了车辆的编程控制,用户可以
通过简单的选择与点击创建小车运行控制脚本,并控制小车按照此脚本设置的任
务顺序进行运行。
本文将介绍此系统的设计思路与设计架构,逐一介绍每部分实验的实验原
理、所需设备与实验步骤,并在最后分析系统设计中存在的问题与可行的改进
方案。您可以访问 github 仓库(地址:
https://github.com/fengguohao/intelligent_vehicle_system)下载该系统
的完整源代码,并在相同的软硬件环境下复现所有步骤。您同样可以通过此仓
库下载观看系统的视频介绍。


剩余24页未读,继续阅读

陈游泳
- 粉丝: 30
- 资源: 302












评论0