5、图论与贪心算法1

需积分: 0 43 浏览量
更新于2022-08-04
收藏 199KB PDF 举报
图论是计算机科学中的一个重要分支,它研究的是图形的性质及其在各种问题中的应用。在图论中,一个图由点集V和边集E组成,其中点是图的基本单元,而边则连接这些点。对于无向图,边没有方向,每条边连接两个点,可以用ne关系表示,其边数的最大数量是n(n-1)/2,这是根据握手定理得出的,即所有点的度之和等于边数的两倍。连通图是指图中任意两个点之间都存在路径,它的最大连通子图称为连通分量。在有向图中,边被称作弧,弧有方向,从弧头指向弧尾,其边数最大可达n(n-1)。强连通图则是有向图中任意两个点都可以互相到达的特殊情况,极大强连通子图即为强连通图的子图。
贪心算法是一种解决问题的方法,它在每一步选择中都采取在当前状态下最好或最优(即最有利)的选择,从而希望导致结果是全局最好或最优。贪心算法并不一定总能得到全局最优解,但往往能获得近似最优解。在图论问题中,贪心算法常用于构造生成树或者寻找最小生成树。例如,迪杰斯特拉算法和克鲁斯卡尔算法就是典型的贪心策略应用。
迪杰斯特拉算法是寻找带权重图中单源最短路径的算法,其核心思想是从起点开始,每次选取当前未访问点中到起点距离最短的一个,并更新其相邻点的距离。这个过程不断进行,直到所有点都被访问。时间复杂度为O(n^2),适用于边数较少的图。
克鲁斯卡尔算法则是从边集中按权重升序选择边,但必须保证添加的新边不会形成环。这个过程一直持续到所有点都在同一棵树中,即形成了最小生成树。时间复杂度为O(elog2e),适用于边数较多的图。
在项目管理中,图论的应用尤为常见,如AOV网(Activity on Vertex Network)和AOE网(Activity on Edge Network)。AOV网是一个有向无环图,表示项目的活动顺序,拓扑排序是确定活动顺序的有效手段。AOE网进一步引入了边的权重,表示活动的持续时间,关键路径(Critical Path)是决定项目最短完成时间的关键活动序列。
在解决实际问题时,我们可能需要判断两点是否连通,这可以通过深度优先搜索实现;寻找两点间的最短路径,可以用广度优先搜索;找出距离某点最远的顶点,同样使用广度优先搜索,但可以使用循环队列以节省空间。
图论与贪心算法在解决实际问题中扮演着重要角色,它们提供了解决复杂网络结构问题的理论基础和有效工具,而理解并掌握这些概念和算法对于IT专业人士来说至关重要。
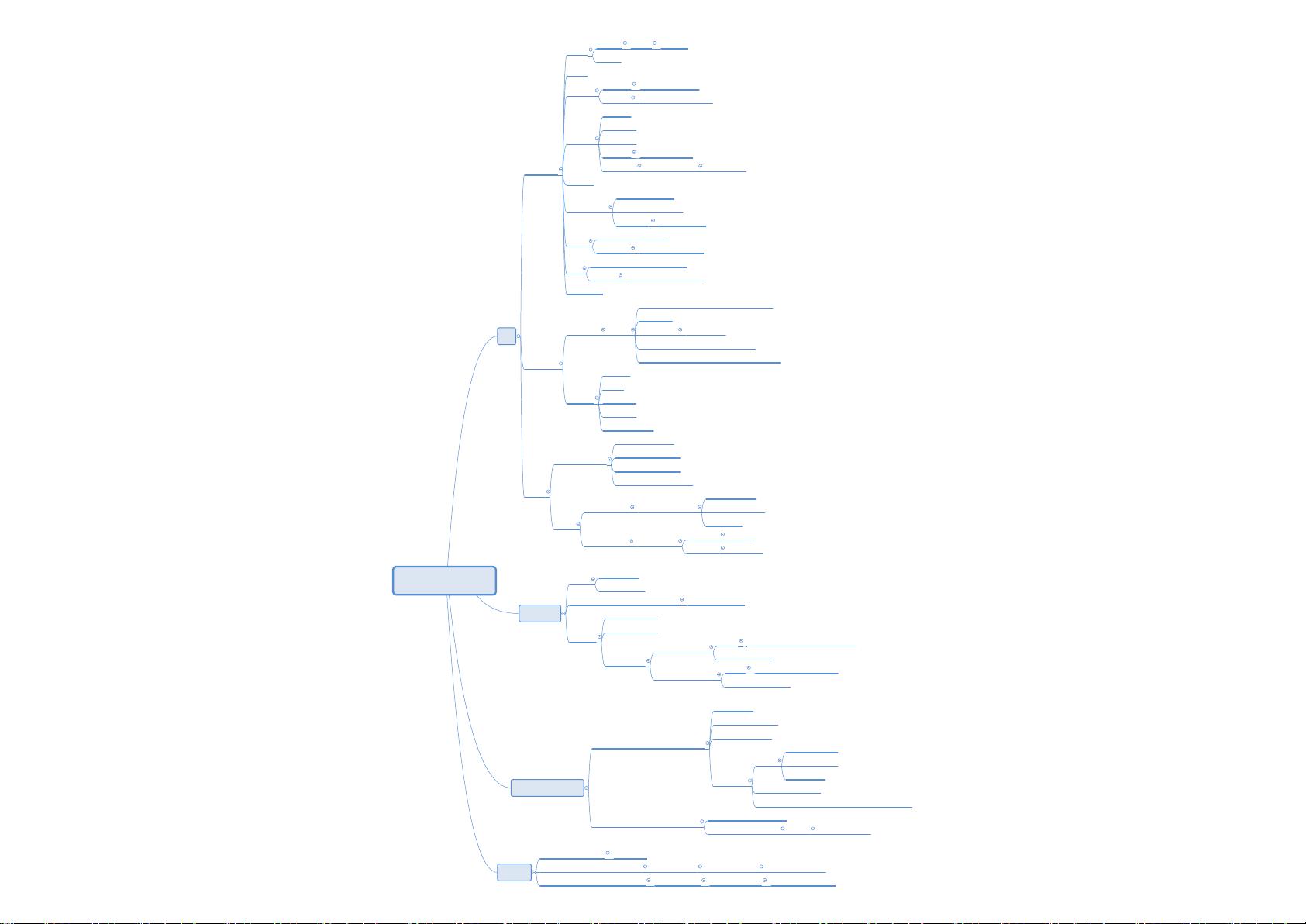
图论与贪心算法
图
基本概念
构成
点集V 端点 邻接点
边集E
子图
无向图
ne关系 0<=e<=n(n-1)/2
连通图 极大连通子图/连通分量
有向图
边->弧
弧头顶点
弧尾顶点
ne关系 0<=e<=n(n-1)
强连通图 极大强连通子图 强连通分量
完全图
度 TD(v)
入度 ID(v) (InDu)
出度 OD(v) (OutDu)
握手定理 e=ΣTD(v)/2
路径
连接两个顶点的边序列
简单路径 任何顶点只经过一次
环
起点终点相同的路径,也称回路
简单环 除起点终点,只经过一次
带权图/网
存储结构
邻接矩阵 特点
无向图邻接矩阵为对称矩阵(可以压缩存储)
表示唯一
空间On^2 适合稠密图
无向图第i行的非零元素个数为该顶点度
有向图第i行(列)的非零元素个数为出(入)度
邻接表
顶点表
边表
逆邻接表
十字链表
空间O(n+e)
遍历
与树遍历的不同
可从任意顶点出发
要考虑其他连通分量
考虑重复遍历的问题
有多个下一个访问的选项
方法
深度遍历DFS 邻接表时间复杂度
找邻接点O(e)
建立标志数组O(n)
总O(n+e)
广度遍历BFS 时间复杂度
深度优先 On^2
广度优先 O(n+e)
贪心算法
要求
最优子结构
贪心选择性质
迪杰斯特拉算法/Dijkstra Algorithm 时间复杂度On^2
生成树
深度优先生成树
广度优先生成树
最小生成树
Prim Algorithm
思路 从已经过节点向外找最短的不成环边
时间复杂度On^2
Kruskal Algorithm
思路 从边集中找最短的不成环边
时间复杂度Oelog2e
项目工作流程规划
AOV网/Activity on Vertex Network
顶点:活动
边:活动的先后关系
是一个有向无环图
拓扑排序
性质
该排序不是排序
有环就排不出来
序列不唯一
建议采用邻接表储存
用栈和队列问题都不大(对0入度点服务顺序无要求)
AOE网/Activity on Edge Network
其实就是个带权的AOV辣
关键路径/Critical Path 口诀 去标大,回标小
应用题
判断两顶点是否连通 深度优先
求无权无向连通图两顶点最短路径 广度优先遍历 因为要输出路径 所以用非循环队列
求无权无向连通图距离v最远的顶点 广度优先遍历 因为不输出路径 所以可以用循环队列
下载后可阅读完整内容,剩余0页未读,立即下载
2013-12-19 上传
107 浏览量
2010-08-27 上传
179 浏览量
181 浏览量
192 浏览量
2009-01-08 上传
117 浏览量
170 浏览量
200 浏览量
2009-06-02 上传
2011-12-03 上传
资源评论


yiyi分析亲密关系
- 粉丝: 33
- 资源: 321









最新资源
- 几何物体检测44-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 几何物体检测43-YOLO(v5至v9)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 基于cruise的燃料电池功率跟随仿真,按照丰田氢能源车型搭建,在wltc工况下跟随效果好,最高车速175,最大爬坡30,百公里9s均已实现 1.模型通过cruise simulink联合仿真,策略
- C#源码 上位机 联合Visionpro 通用框架开发源码,已应用于多个项目,整套设备程序,可以根据需求编出来,具体Vpp功能自己编 程序包含功能 1.自动设置界面窗体个数及分布 2.照方式以命令触
- 程序名称:悬架设计计算程序 开发平台:基于matlab平台 计算内容:悬架偏频刚度挠度;螺旋弹簧,多片簧,少片簧,稳定杆,减震器的匹配计算;悬架垂向纵向侧向力学、纵倾、侧倾校核等;独立悬架杠杆比,等效
- 华为OD+真题及解析+智能驾驶
- jQuery信息提示插件
- 基于stm32的通信系统,sim800c与服务器通信,无线通信监测,远程定位,服务器通信系统,gps,sim800c,心率,温度,stm32 由STM32F103ZET6单片机核心板电路、DS18B2
- 充电器检测9-YOLO(v5至v11)、COCO、Create充电器检测9L、Paligemma、TFRecord、VOC数据集合集.rar
- 华为OD+考试真题+实现过程
