Aardvark协议(BFT)1

需积分: 0 59 浏览量
更新于2022-08-03
收藏 429KB PDF 举报
《Aardvark协议(BFT)1》
在分布式计算领域,拜占庭容错(Byzantine Fault Tolerance,BFT)是确保系统在存在恶意或错误行为的节点时仍能正常运行的关键技术。Aardvark协议是针对这一问题提出的一种新型BFT协议,旨在提高对拜占庭故障的容忍度,同时保持高效的性能。
近年来,虽然已经开发出了一些快速的BFT状态机复制协议,如PBFT(Practical Byzantine Fault Tolerance)、Q/U、HQ和Zyzzyva等,但这些协议在面对单个故障的客户端或服务器时表现得相当脆弱。它们的性能可能会大幅度下降,甚至导致长时间的服务不可用。这种现象与BFT系统的初衷相悖,因为真正的拜占庭容错系统应该能够在出现故障时依然提供可靠服务。
本论文首先揭示了现有BFT协议的脆弱性,指出它们在面对拜占庭故障时的不足。然后,它提出了构建BFT服务的一系列原则,以确保即使在发生拜占庭故障时,系统仍能保持实用性。基于这些原则,研究者设计并实现了一种新的BFT协议——Aardvark。
Aardvark协议的设计目标是在保持高效性能的同时,增强对拜占庭故障的容忍度。在测试中,Aardvark协议的峰值性能可以达到最优秀的现有协议的96%,并且在最多f个服务器和任意数量的客户端出现故障时,仍然能提供相当一部分性能。实验结果显示,对于各种注入的故障,Aardvark协议在吞吐量上表现出色,范围在每秒11706到38667个请求之间。
Aardvark协议的核心创新在于其对拜占庭故障的处理策略和优化机制。它采用了更精细的故障检测和恢复机制,以及更为灵活的共识算法,以减少单点故障对整个系统的影响。此外,Aardvark还通过改进通信和验证流程,降低了处理故障时的延迟,提高了系统的可用性。
Aardvark协议是对传统BFT协议的一次重要改进,它不仅提升了系统的容错能力,而且在性能上也取得了显著的提升。这为构建更安全、更可靠的分布式系统提供了新的解决方案,尤其是在那些对容错性和性能有高要求的应用场景中,Aardvark协议具有很大的应用潜力。
USENIX Association NSDI ’09: 6th USENIX Symposium on Networked Systems Design and Implementation 153
Making Byzantine Fault Tolerant Systems
Tolerate Byzantine Faults
Allen Clement, Edmund Wong, Lorenzo Alvisi, Mike Dahlin
The University of Texas at Austin
Mirco Marchetti
The University of Modena and Reggio Emilia
Abstract
This paper argues for a new approach to building Byzan-
tine fault tolerant replication systems. We observe that
although recently developed BFT state machine replica-
tion protocols are quite fast, they don’t tolerate Byzantine
faults very well: a single faulty client or server is capa-
ble of rendering PBFT, Q/U, HQ, and Zyzzyva virtually
unusable. In this paper, we (1) demonstrate that exist-
ing protocols are dangerously fragile, (2) define a set of
principles for constructing BFT services that remain use-
ful even when Byzantine faults occur, and (3) apply these
principles to construct a new protocol, Aardvark. Aard-
vark can achieve peak performance within 40% of that of
the best existing protocol in our tests and provide a sig-
nificant fraction of that performance when up to f servers
and any number of clients are faulty. We observe useful
throughputs between 11706 and 38667 requests per sec-
ond for a broad range of injected faults.
1 Introduction
This paper is motivated by a simple observation: al-
though recently developed BFT state machine replica-
tion protocols have driven the costs of BFT replication
to remarkably low levels [1, 8, 12, 18], the reality is that
they don’t tolerate Byzantine faults very well. In fact, a
single faulty client or server can render these systems ef-
fectively unusable by inflicting multiple orders of mag-
nitude reductions in throughput and even long periods
of complete unavailability. Performance degradations of
such degree are at odds with what one would expect from
a system that calls itself Byzantine fault tolerant—after
all, if a single fault can render a system unavailable, can
that system truly be said to tolerate failures?
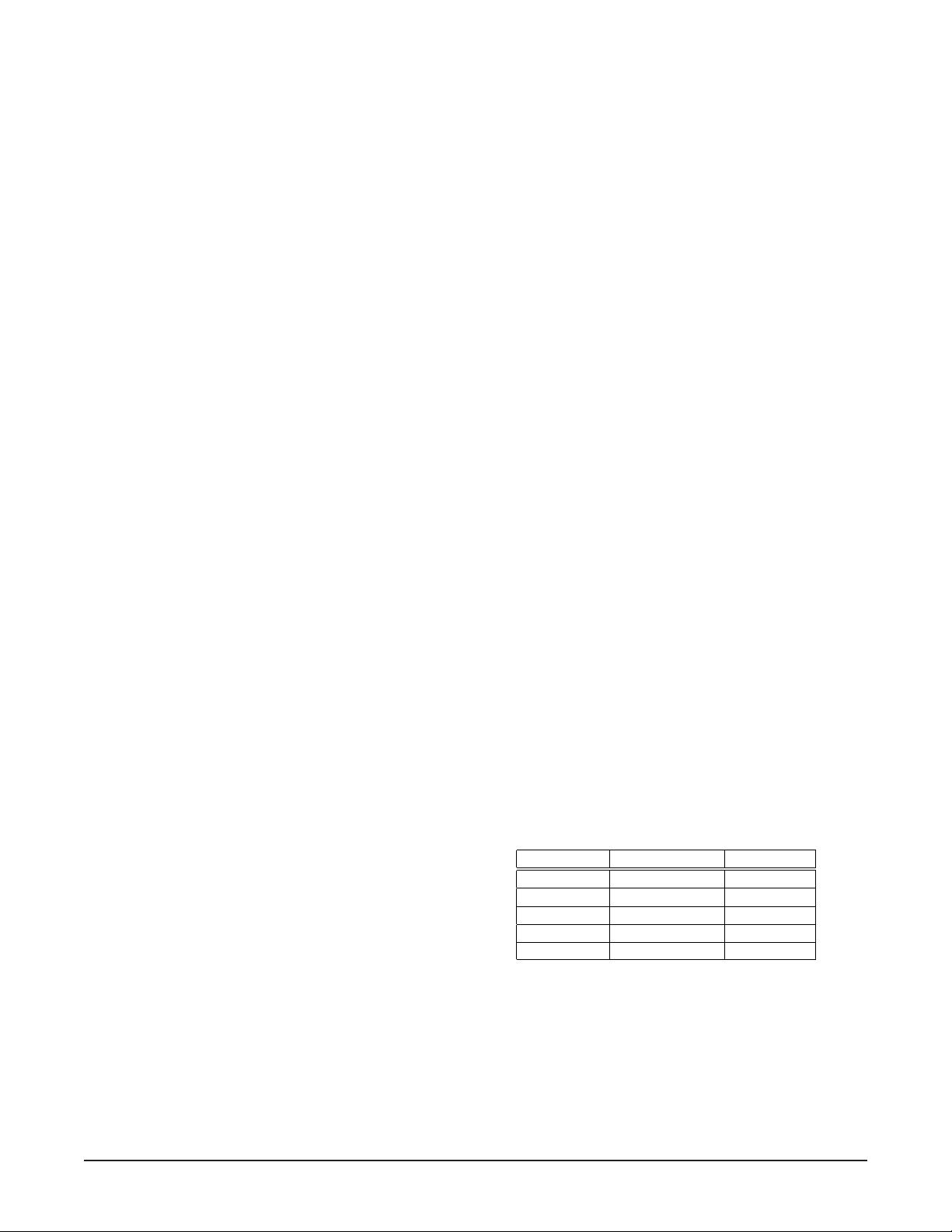
To illustrate the the problem, Table 1 shows the mea-
sured performance of a variety of systems both in the
absence of failures and when a single faulty client sub-
mits a carefully crafted series of requests. As we show
later, a wide range of other behaviors—faulty primaries,
recovering replicas, etc.—can have a similar impact. We
believe that these collapses are byproducts of a single-
minded focus on designing BFT protocols with ever
more impressive best-case performance. While this fo-
cus is understandable—after years in which BFT repli-
cation was dismissed as too expensive to be practical,
it was important to demonstrate that high-performance
BFT is not an oxymoron—it has led to protocols whose
complexity undermines robustness in two ways: (1) the
protocols’ design includes fragile optimizations that al-
low a faulty client or server to knock the system off of
the optimized execution path to an expensive alternative
path and (2) the protocols’ implementation often fails to
handle properly all of the intricate corner cases, so that
the implementations are even more vulnerable than the
protocols appear on paper.
The primary contribution of this paper is to advocate a
new approach, robust BFT (RBFT), to building BFT sys-
tems. Our goal is to change the way BFT systems are de-
signed and implemented by shifting the focus from con-
structing high-strung systems that maximize best case
performance to constructing systems that offer accept-
able and predictable performance under the broadest pos-
sible set of circumstances—including when faults occur.
System Peak Throughput Faulty Client
PBFT [8] 61710 0
Q/U [1] 23850 0
†
HQ [12] 7629 N/A
‡
Zyzzyva [18] 65999 0
Aardvark 38667 38667
Table 1: Observed peak throughput of BFT systems in a
fault-free case and when a single faulty client submits a
carefully crafted series of requests. We detail our mea-
surements in Section 7.2.
†
The result reported for Q/U is
for correct clients issuing conflicting requests.
‡
The HQ
prototype demonstrates fault-free performance and does
not implement many of the error-handling steps required
to handle inconsistent MACs.



剩余15页未读,继续阅读
175 浏览量
2019-09-22 上传
2019-07-31 上传
181 浏览量
2019-08-15 上传
2021-05-23 上传
182 浏览量
2022-10-11 上传
196 浏览量
2021-02-25 上传
174 浏览量
110 浏览量
2021-04-22 上传
178 浏览量
153 浏览量
151 浏览量
170 浏览量
149 浏览量
2021-02-13 上传
2021-02-04 上传
200 浏览量
2022-08-04 上传
2021-04-30 上传
资源评论


马李灵珊
- 粉丝: 41
- 资源: 297









最新资源
- 智慧社区解决方案-6PPT(25页).pptx
- 40页-智慧社区一体化建设方案(重庆).pdf
- 智慧社区人脸识别整体解决方案Word(20页).doc
- 41页-智慧社区解决方案.pdf
- 智慧社区理念与解决方案介绍PPT(22页).pptx
- Springboot+vue的智能家居系统(有报告),Javaee项目,springboot vue前后端分离项目
- 智慧社区解决方案-10Word(253页).docx
- 智慧社区解决方案——智能安防建设解决方案PPT(69页).pptx
- Linux环境中Alist服务端安装与配置方法全解析
- Linux系统中JDK安装与环境配置教程
- 西门子PLC 200 Smart恒压供水编程之旅:昆仑通态触摸屏与ABB变频器参数设置实战学习视频分享,西门子PLC 200SMART恒压供水编程实战:昆仑通态触摸屏与ABB变频器参数设置学习指南及上
- 方钢管混凝土构件火灾、撞击与爆炸耦合模型解析视频教程:ABAQUS CAE+ODB应用实战,方钢管混凝土构件火灾、撞击与爆炸耦合模型解析教程:ABAQUS CAE+ODB应用详解,方钢管混凝土构件火灾
- 深度学习算法在噬菌体特异性蛋白质预测中的应用:完整代码实现与数据集分析,深度学习算法在噬菌体特异性蛋白质预测中的应用:完整代码实现与数据集分析,使用深度学习方法预测噬菌体特异性蛋白质完整代码实现,含数
- 基于国际大厂ADS1242的24bit二阶sigma delta ADC技术,应用于BIM的人体阻抗测量前端AFE芯片,采用smic55nm工艺,真实仿真非虚拟库实现 ,国际大厂ADS1242 AFE
- StarFree开源的简约唯美的论坛源码
- 基于布莱克曼窗的99阶FIR滤波器设计,实现50MHz采样频率下的1.5MHz通带滤波,图例展示滤波效果,Quartus仿真下的FIR滤波器设计:采用布莱克曼窗,99阶,50MHz采样频率与1.5MH
