
书书书
第
44
卷
第
10
期
中
国
激
光
Vol.44
,
No.10
2017
年
10
月
CHINESE
J
OURNAL
OF
LASERS
October
,
2017
平面舱壁类型的船舱点云分割方法
杨泽鑫
1
,
程效军
1
,
2
,
李
泉
1
,
胡敏捷
3
,
欧
健
3
,
辛佩康
1
,
郭
王
1
1
同济大学测绘与地理信息学院
,
上海
200092
;
2
同济大学现代工程测量国家测绘地理信息局重点实验室
,
上海
200092
;
3
上海船舶研究设计院
,
上海
201203
摘要
针对船舱复杂构件点云提取存在人工成本高
、
效率低的问题
,
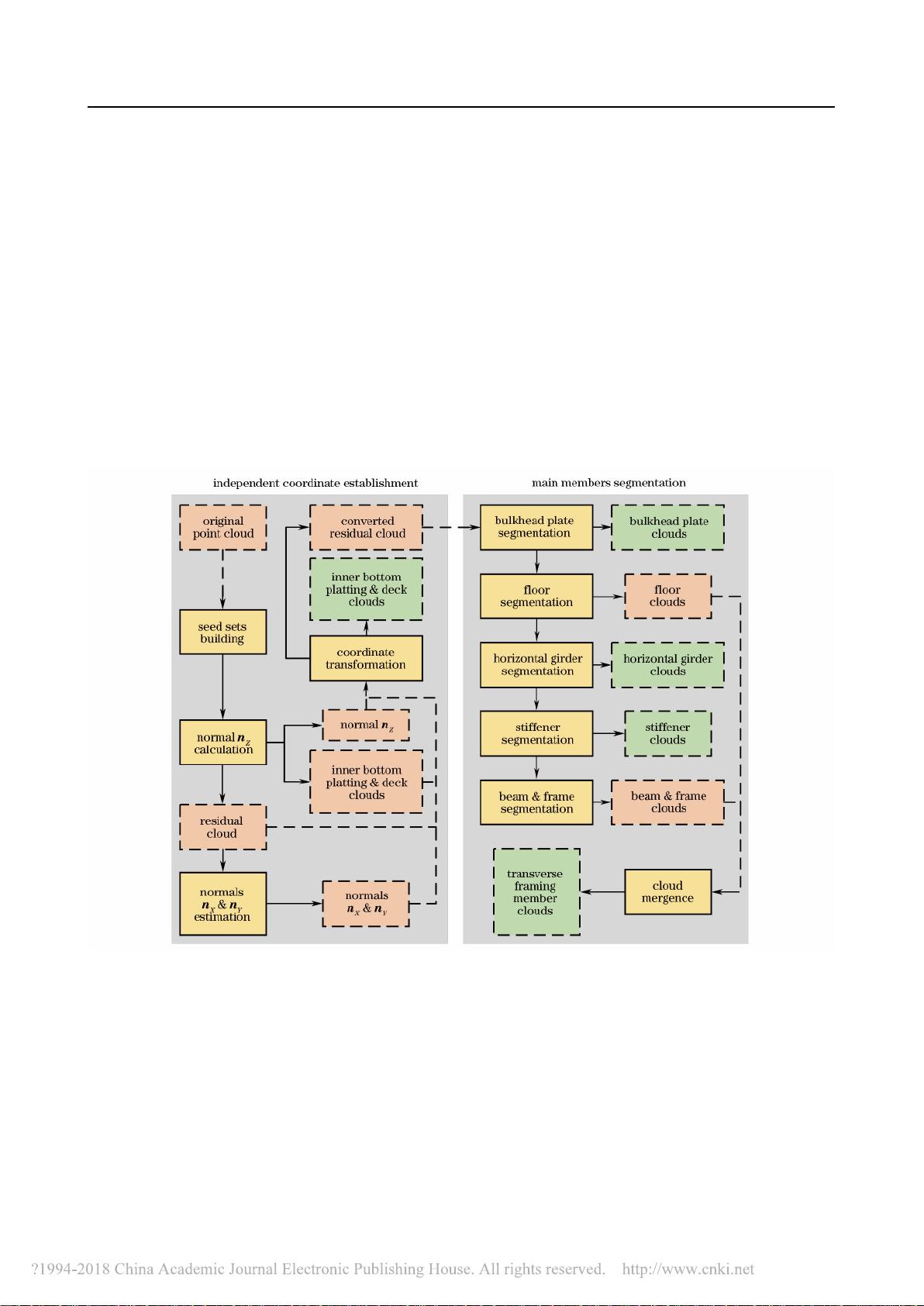
提出了一种适用于平面舱壁类型船舱点云的
分割方法
。
通过种子点集构建
、
点云法线估计及直线拟合的方式建立以船舱纵向为
X
轴
、
横向为
Y
轴
、
竖向为
Z
轴的独立坐标系
,
以简化分割算法的复杂度
;
根据船舱内部复杂构件的分布特性
,
制定最佳分割次序
,
基于随机采
样一致性算法拟合平面的思想有序地分割船舱构件点云
。
选用两组不同结构的船舱点云数据进行算法验证
,
实验
结果表明
:
该方法能够从不同结构的船舱散乱点云中快速
、
准确地自动分割出主要构件点云
,
可靠性强
,
具有较高
的实用价值
。
关键词
遥感
;
点云分割
;
随机采样一致性算法
;
船舱构件提取
;
三维激光扫描
中图分类号
P232
文献标识码
A
doi
:
10.3788
/
C
J
L201744 . 1010006
Se
g
mentation
of
Point
Cloud
in
Tank
of
Plane
Bulkhead
T
yp
e
Yan
g
Zexin
1
,
Chen
g
Xiao
j
un
1
,
2
,
Li
Quan
1
,
Hu
Min
j
ie
3
,
Ou
Jian
3
,
Xin
Peikan
g
1
,
Guo
Wan
g
1
1
Colle
g
e
o
f
Surve
y
in
g
and
Geo
-
In
f
ormatics
,
Ton
gj
i
Universit
y
,
Shan
g
hai
200092
,
China
;
2
Ke
y
Laborator
y
o
f
Advanced
En
g
ineerin
g
Surve
y
in
g
o
f
National
Administration
o
f
Surve
y
in
g
,
Ma
pp
in
g
and
Geoin
f
ormation
,
Ton
gj
i
Universit
y
,
Shan
g
hai
200092
,
China
;
3
Shan
g
hai
Merchant
Shi
p
Desi
g
n
and
Research
Institute
,
Shan
g
hai
201203
,
China
Abstract
To
solve
the
hi
g
h
labor
cost
and
low
efficienc
y
p
roblems
of
com
p
lex
tank
members
extraction
,
we
p
ro
p
ose
a
p
oint
cloud
se
g
mentation
al
g
orithm
which
is
a
pp
licable
to
tank
of
p
lane
bulkhead
t
yp
e.The
ste
p
s
of
this
a
pp
roach
are
as
follows
:
the
ori
g
inal
p
oint
cloud
is
firstl
y
transformed
to
the
inde
p
endent
coordinate
,
whose
X
,
Y
and
Z
axes
are
defined
as
the
lon
g
itudinal
,
transverse
and
vertical
directions
of
tank
,
based
on
seed
sets
buildin
g
,
normal
estimation
and
linear
fittin
g
;
then
clouds
of
each
tank
member
are
se
g
mented
in
the
best
order
b
y
p
lane
fittin
g
of
random
sam
p
le
consensus
(
RANSAC
)
method
accordin
g
to
the
distribution
of
com
p
lex
tank
members.Ex
p
erimental
results
on
two
sets
of
p
oint
clouds
show
that
the
p
ro
p
osed
al
g
orithm
can
q
uickl
y
,
accuratel
y
and
automaticall
y
se
g
ment
the
clouds
of
main
members
from
unor
g
anized
clouds
,
which
demonstrate
the
hi
g
h
reliabilit
y
and
p
ractical
value
of
the
p
ro
p
osed
method.
Ke
y
words
remote
sensin
g
;
p
oint
cloud
se
g
mentation
;
random
sam
p
le
consensus
al
g
orithm
;
tank
members
extraction
;
three
-
dimensional
laser
scannin
g
OCIS
codes
280.3640
;
150.6910
;
150.1135
收稿日期
:
2017
-
05
-
17
;
收到修改稿日期
:
2017
-
06
-
15
基金项目
:
国家自然科学基金
(
41671449
)、
上海船舶研究设计院科技项目
(
JSJC2013206 C204
)
作者简介
:
杨泽鑫
(
1994
—),
男
,
硕士研究生
,
主要从事点云处理方面的研究
。
E
-
mail
:
zx
y
an
g
15
@
163.com
导师简介
:
程效军
(
1964
—),
男
,
博士
,
教授
,
主要从事三维激光扫描与数字近景摄影测量方面的研究
。
E
-
mail
:
cx
j
@
ton
gj
i.edu.cn
(
通信联系人
)
1
引
言
三维激光扫描技术近年来得到迅猛发展
,
可以快速
、
大面积获取扫描对象表面的高分辨率三维坐标数
1010006
-
1
剩余7页未读,继续阅读

五月Eliy
- 粉丝: 40
- 资源: 304









最新资源
- 基于移动平台的远程在线诊疗系统+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的跳蚤市场设计与实现ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的影院选座系统+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的水果销售系统的设计与实现springboot-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- COMSOL光学模型:一维光子晶体nanobeam三维模型仿真(包含场分布,透射光谱)
- 家具购物小程序+php-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 计算机实验室排课与查询系统+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 家庭财务管理系统的设计与实现+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的小说阅读系统ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的外卖点餐系统设计与实现ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的网约巴士订票平台的设计与实现ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 家庭事务管理微信小程序+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 家庭大厨微信小程序+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 家政服务管理系统+ssm-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.rar
- 基于微信小程序的校园兼职系统-微信小程序毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 汇川MD500E变频器开发方案 源码+解析+控制板原理图, MD500E代码方案和解析文档+原理图+送仿真资料 资料全 包含pmsm的foc控制算法,电阻、电感、磁链等参数的辩识算法,死
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0