自动驾驶控制算法第八讲2

需积分: 0 110 浏览量
更新于2022-08-03
收藏 5.73MB PDF 举报
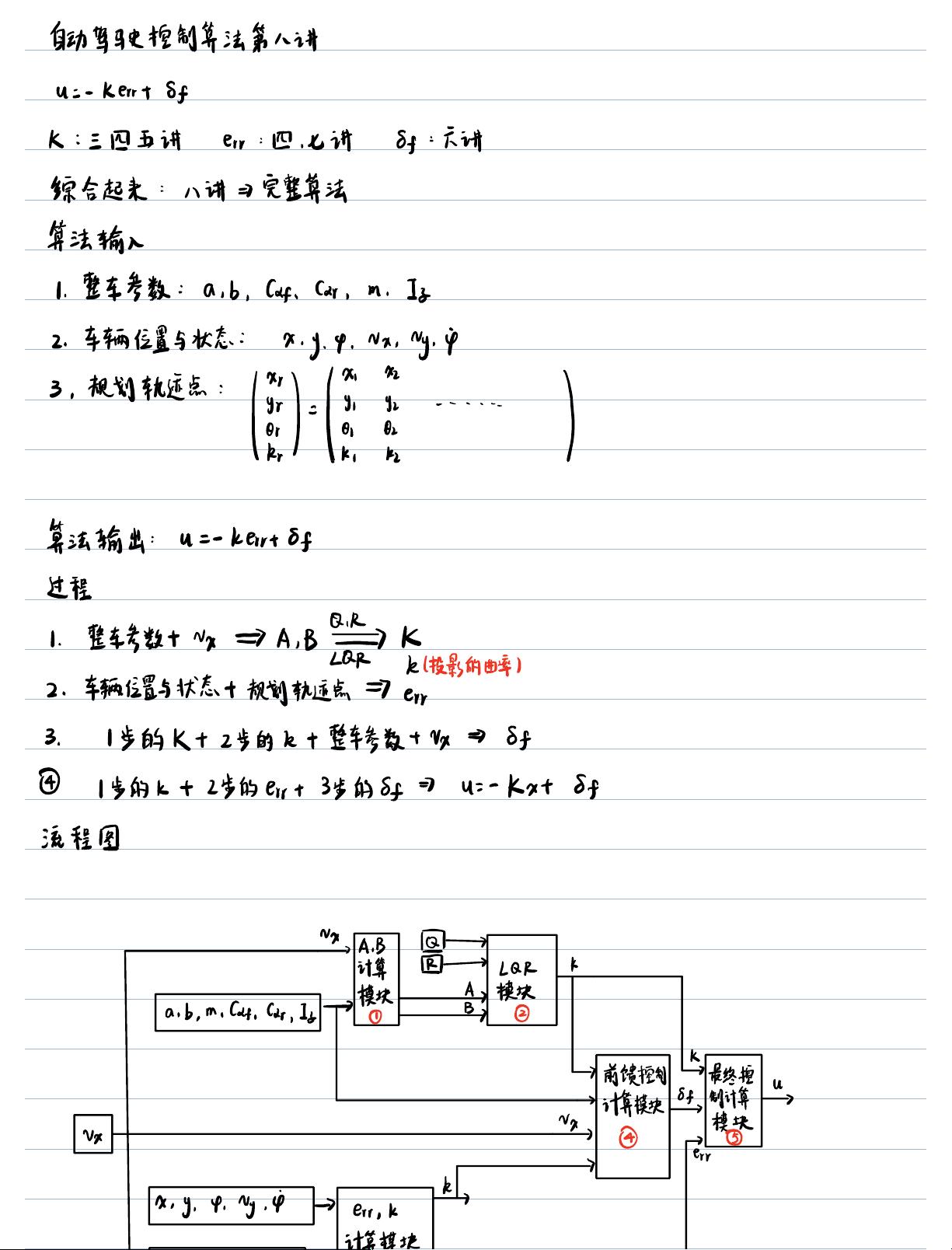
自动驾驶控制算法是实现智能汽车自主行驶的关键技术,它涉及到车辆动力学、路径规划、感知决策等多个领域。在“自动驾驶控制算法第八讲2”中,主要讨论的是一个完整的自动驾驶控制算法,该算法综合了多讲中的内容,特别是关于车辆状态估计、轨迹规划和控制输出的优化方法。
算法的输入包括整车参数(如车辆的长度、宽度、质心位置等,用a、b、CA等表示),以及车辆的位置和状态(x、y、y'、N、g等)。这些参数用于描述车辆在三维空间中的状态,并且在规划轨迹点的计算中起到关键作用。轨迹规划点的确定,通常需要考虑到车辆的动态特性,例如车辆的转弯半径、加速度限制等因素。
算法中提到了Kart-Sf算法,这是一种用于控制输出的过程,它将规划轨迹点投影到车辆的坐标系中。这一过程涉及到轨迹点的曲率计算,曲率是衡量曲线弯曲程度的重要指标,对于自动驾驶控制来说,确保车辆能够平滑地沿着规划路径行驶至关重要。Kart-Sf算法可能使用了QR分解方法,这在优化控制问题中很常见,因为它可以快速求解线性方程组。
在控制算法中,LQR(Linear Quadratic Regulator)是一种广泛应用的控制器设计方法,它基于最小化二次性能指标来寻找最优控制输入。在本讲中,LQR模块仅与整车参数和车辆速度有关,而这些参数通常被认为是常数。然而,当车辆速度改变时,自驾车模型的侧偏刚度会发生变化,但FZF(Front Wheel Slip Angle)和FFZ(Front Wheel Steer Angle)仍然可以用传统的自行车模型来近似。LQR的优势在于计算速度快,但需要预先计算并存储大量的控制参数,这种方法被称为离线查表法,牺牲了一些存储空间以换取实时控制的效率。
控制算法的执行流程包括:首先通过AB计算模块计算车辆的当前状态,接着使用LQR模块生成控制输入,然后通过遍历找到最近的规划轨迹点,计算相应的控制输出。这个过程中,预测模块的作用是预测未来一段时间内的车辆状态,以便提前进行控制决策,减少控制的滞后性。
预测模块预测的时间间隔记为ts,它基于当前车辆状态xt、速度vt等,通过数学模型预测未来Nts个时间步长的状态,包括位置、速度和方向等。预测结果有助于实现更加平滑和精确的转向控制,使车辆能够适应不断变化的道路环境。
“自动驾驶控制算法第八讲2”涉及的知识点主要包括车辆状态估计、轨迹规划、LQR控制、离线查表法以及预测控制,这些都是构建高效自动驾驶系统的核心技术。这些技术的优化和组合使用,旨在确保自动驾驶车辆能够在复杂环境中安全、稳定地行驶。
⾃动
驾驶
控制
算法
第⼋
讲
u
Kerr
t
S
f
K
三
四
五
讲
err
四
七
讲
Sf
六
讲
综合
起来
⼋
讲
完整
算法
算法
输⼊
l
整⻋
参数
a
b
CA
Car
m
I
⼦
2
⻋辆
位置
与
状态
x
y
y
Nx
gg
了
规划
轨迹
点
劁
愼
蜜
算法
输出
u
kart
Sf
过程
QR
l
整⻋
参数
N
x
7
A
B
K
LQR
2
⻋辆
位置
与
状态
规划
轨迹
点
是
投影
的
曲率
1
3
1
步
的
K
2
步
的
kt
整⻋
参数
trx
Sf
④
1
步
的
K
1
2
步
的
err
3
步
的
Sf
u
Kxt
Sf
流程图
以
A
13
回
计算
⻄
i
LQR
k
模块
模块
ab
m
G
hr
It
7
0
20
K
7
前馈
控制
最终
控
u
计算
模块
外
制
计算
以
模块
vx
50
err
k
ing
4
y
4
-
7
err
k
计算
模块
下载后可阅读完整内容,剩余4页未读,立即下载
130 浏览量
2022-08-03 上传
103 浏览量
2022-08-03 上传
2022-08-03 上传
159 浏览量
2022-08-03 上传
151 浏览量
194 浏览量
117 浏览量
116 浏览量
151 浏览量
198 浏览量
160 浏览量
117 浏览量
2021-05-19 上传
198 浏览量
2021-04-18 上传
2020-04-20 上传
资源评论


人亲卓玛
- 粉丝: 37
- 资源: 329









最新资源
- v5vv5v5v55v5v5v55v5
- 基于java+ssm+mysql的新闻网站 源码+数据库+论文(高分毕设项目).zip
- 基于java+ssm+mysql的校园线上订餐系统 源码+数据库+论文(高分毕设项目).zip
- 基于java+ssm+mysql的校园心理健康网站 源码+数据库+论文(高分毕设项目).zip
- Python游戏源码-09五子棋
- 基于主从博弈的电热综合能源系统动态定价与能量管理策略优化-粒子群算法与CPLEX求解器的应用,MATLAB代码:基于主从博弈的电热综合能源系统动态定价与能量管理 超值 关键词:主从博弈 电热综合能源
- 基于java+ssm+mysql的学生资助管理系统 源码+数据库+论文(高分毕设项目).zip
- RexVision 1.6.1:C#与Halcon机器视觉框架集成源码,适用于视觉检测与机械手定位,插件式开发,手眼标定与C#脚本支持,高效省时,RexVision 1.6.1,C#+Halcon机器
- 基于java+ssm+mysql的学生在线考试系统 源码+数据库+论文(高分毕设项目).zip
- 基于分时电价机制的家庭能量管理策略优化研究:结合空调、电动汽车与可平移负荷的智能调控模型,MATLAB代码:基于分时电价条件下家庭能量管理策略研究 关键词:家庭能量管理模型 分时电价 空调 电动汽车
- 基于java+ssm+mysql的医院交互系统 源码+数据库+论文(高分毕设项目).zip
- 基于java+ssm+mysql的音乐电影分享系统 源码+数据库+论文(高分毕设项目).zip
- 基于java+ssm+mysql的眼镜网店销售系统 源码+数据库+论文(高分毕设项目).zip
- Python游戏源码-10植物大战僵尸
- **《电子凸轮控制系统Ver2.3.0:双轴定速伺服运动与送料动作的精准协调》**,电子凸轮-区间运动Ver2.3.0(位置跟随,去程+返程,适合送料动作) 1.一个主轴伺服(定速运动)+一个从轴伺服
- 基于java+ssm+mysql的游戏资源管理系统 源码+数据库+论文(高分毕设项目).zip
