单目深度估计+DSO1
需积分: 0 163 浏览量
更新于2022-08-03
收藏 2.45MB PDF 举报
单目深度估计与DSO(Direct Sparse Odometry)结合是一种解决传统单目视觉里程计(Visual Odometry, VO)中尺度漂移问题的有效方法。在本文中,作者提出利用深度学习预测单目图像的深度信息,将其融入DSO中,形成一种名为Deep Virtual Stereo Odometry(深度虚拟立体视觉里程计)的新技术。这种方法可以克服几何基础单目视觉里程计的局限,并且不需要连续帧之间有显著的视差变化就能进行运动估计和三维重建。
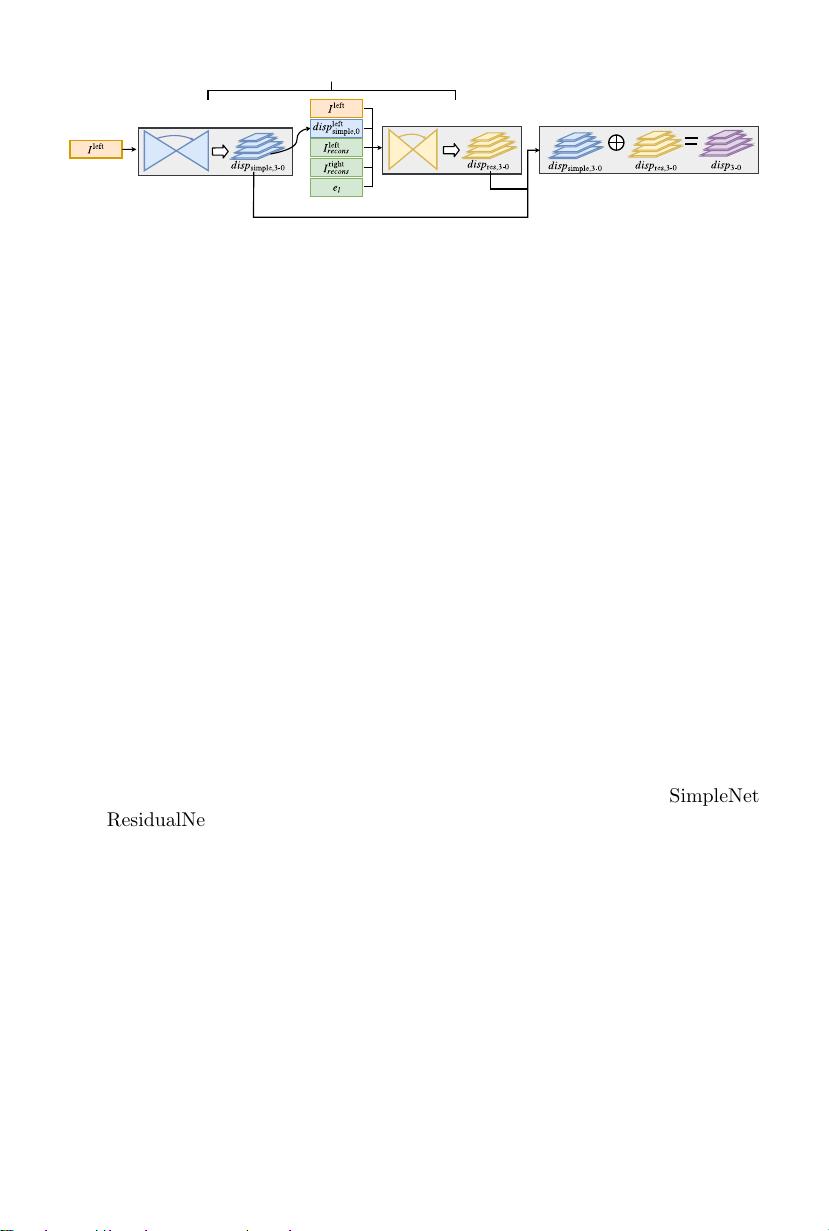
深度网络的设计是关键。为了预测深度,作者设计了一个新颖的深度神经网络,它通过两阶段过程对单个图像的预测深度进行精细化处理。网络的训练采用半监督学习方式,一方面基于立体图像的光一致性,另一方面基于Stereo DSO得到的精确稀疏深度重建进行一致性训练。在KITTI基准测试中,该深度预测方法超越了现有的单目深度估计方法。
Deep Virtual Stereo Odometry在准确性上明显优于之前的单目和基于深度学习的视觉里程计方法。它仅依赖一个摄像头,却能实现与最先进的立体视觉方法相当的性能。这表明,通过结合深度学习和DSO,即使在单目设置下,也能实现高精度的定位和场景理解。
单目深度估计通常是一个困难的任务,因为深度信息必须从二维图像中恢复出来,而这种恢复往往受到缺乏直接深度测量的限制。通过深度网络,可以从大量数据中学习到深度模式和上下文信息,从而提供更准确的深度预测。DSO则是一种直接法视觉里程计,它直接估计像素级别的光度误差,从而减少对特征匹配的依赖。将深度预测与DSO相结合,可以将深度信息转化为“虚拟立体”测量,弥补单目系统中的尺度不确定性。
此外,论文还讨论了这种方法在自动驾驶、机器人导航和增强现实等领域的潜在应用。由于不需要复杂的硬件设备,仅使用一个摄像头即可实现高精度的定位,这对于资源有限的移动平台尤其具有吸引力。
总结来说,这篇论文提出了一个创新的框架,将深度学习和直接法视觉里程计相结合,提高了单目视觉里程计的精度和鲁棒性。这种方法不仅在深度预测上取得了突破,而且在实际应用中表现出了强大的竞争力,为单目视觉定位和3D重建提供了新的思路。未来的研究可能会进一步探索如何优化网络架构,提高实时性能,以及如何扩展到更复杂的环境和动态场景。

Deep Virtual Stereo Odometry:
Leveraging Deep Depth Prediction for
Monocular Direct Sparse Odometry
Nan Yang
1,2[0000−0002−1497−9630]
, Rui Wang
1,2[0000−0002−2252−9955]
,
J¨org St¨uckler
1[0000−0002−2328−4363]
, and Daniel Cremers
1,2
1
Technical University of M u n i ch
2
Artisense
{yangn,wangr,stueckle,cremers}@in.tum.de
Abstract. Monocular visual odometry approaches that purely rely on
geometric cues are prone to scale drift an d require sufficient motion par-
allax in successive frames for motion estimation and 3D reconstructi o n .
In this pa per, we propose to leverage deep monocular depth prediction
to overcome limitations of geometry-based monocular visual odometry.
To this end, we incorporate deep d ep t h predictions into Direct Sparse
Odometry (DSO) as direct virtu a l stereo measurements. For depth pre-
diction, we design a novel deep network that refines predicted depth from
a single image in a two-stage process. We train our network in a semi-
supervised way on photoconsi st en c y in stereo images and on consistency
with accurate sparse depth reconstructions f ro m Stereo DSO. Our deep
predictions excel state-of-the-art approaches for monocular depth on the
KITTI benchmark. Moreover, our Deep Virtual Stereo Odometry clearly
exceeds previous monocular a n d deep-learning based method s i n a c c u -
racy. It even achieves comparable performance to the state-of-the-art
stereo methods, while only relying on a single camera.
Keywords: Monocular depth estimatio n · Monocular visual odometry
· Semi-supervised learning
1 Introduction
Visual odometry (VO) is a highly active field of research in c ompu t er vision with
a plethora of applications in domains such as autonomous driving, robotics,
and augmented reality. VO with a single camera using traditional geometric
approaches inherently suffers from t h e fact th at camera t r ajectory and map
can only be estimated up to an unknown scal e which also leads to scale drift.
Moreover, sufficient motion parallax is required to estimate motion and structure
from successive frames. To avoid these issues, typically more complex sensors
such as act ive depth cameras or stereo rigs are employed. However, these sensors
require larger efforts in calibration and increase the costs of the vision system.
Metric depth can also be recovered from a single image if a-priori knowledge
about the typical sizes or appearances of objects is used . Deep learning based
deep prediction目前最优
单目深度估计+DSO

剩余16页未读,继续阅读
122 浏览量
136 浏览量
2010-11-24 上传
2019-04-07 上传
192 浏览量
171 浏览量
105 浏览量
200 浏览量
199 浏览量
185 浏览量
资源评论


宝贝的麻麻
- 粉丝: 42
- 资源: 294









最新资源
- 【培训实施】-05-培训计划及实施方案.docx.doc
- 【培训实施】-03-企业培训整体规划及实施流程.docx
- 【培训实施】-08-培训实施.docx
- 【培训实施】-06-培训实施方案.docx
- 【培训实施】-11-培训实施流程 .docx
- 【培训实施】-09-公司年度培训实施方案.docx
- 【培训实施】-10-培训实施计划表.docx
- 【培训实施】-14-培训实施流程图.xlsx
- 【培训实施】-13-培训实施流程.docx
- 【培训实施】-12-企业培训实施流程.docx
- CentOS7修改默认启动级别
- 基于web的旅游管理系统的设计与实现论文.doc
- 02-培训师管理制度.docx
- 01-公司内部培训师管理制度.docx
- 00-如何塑造一支高效的企业内训师队伍.docx
- 05-某集团内部培训师管理办法.docx
