CAPG-IMU硬件设备输出姿态数据问题1
需积分: 0 141 浏览量
2022-08-08
23:21:55
上传
评论
收藏 430KB DOCX 举报

CAPG-IMU 硬件设备输出姿态数据问题
问题描述:
1. 杜宇提示:存在两个坐标系,a. 信电系坐标系; b. zsens(@李启雷)坐标系。
李启雷-杜宇在计算设备姿态(rotation vector)时,进行了某种变换(没有文档,杜宇
记不清了),变换可能包括:坐标轴取反、轴置换操作,导致坐标系定义改变,可能变
为左手系。在直接输出的旋转向量四元数表达中,坐标系定义(轴方向、以及左右手系)
不同于原始的信电系坐标系。
2. zsens 系统输出的旋转向量四元数表示,是以系统开始采集时的第一帧机身坐标系为参
考系的,并非地球 NED(or ENU)坐标系,但是这并不影响 AX=XB 问题求解。AX=XB 问
题的目的就在于,不需要测量两个观测系统的参考系之间的相对旋转,直接通过 A, B 两
组观测值,求解 A, B 之间的转换关系。
3. 张琛验证结果:
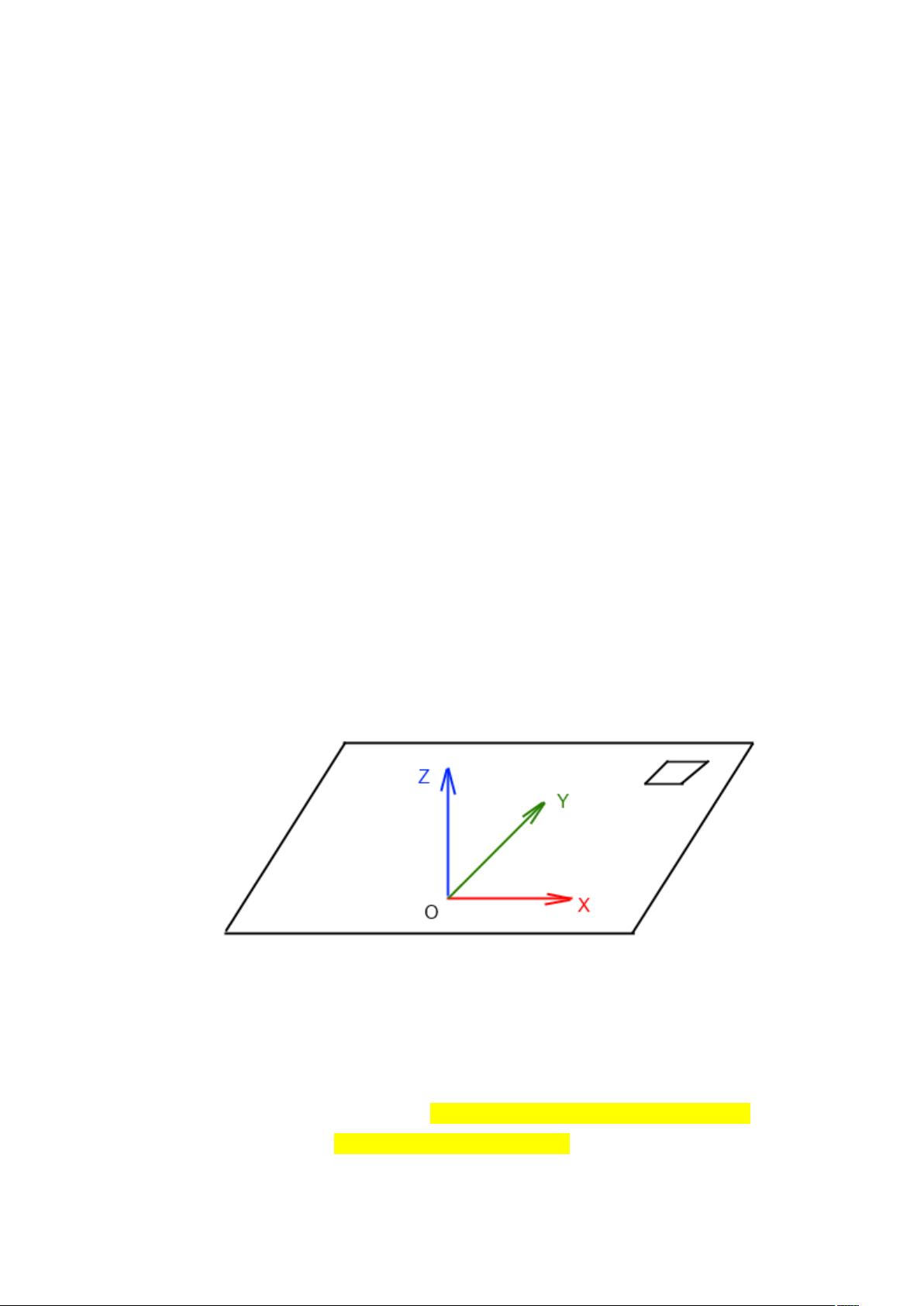
① 根据静态 acc 值,推测机身坐标系如图 1 所示,是右手系。
图 1 信电系 IMU sdk 右手坐标系定义
右上角方块为设备开关按钮。
② 将设备按照图 1 三轴定义,对于测试数据 CaptureSession-checkaxes.ynorth.xml,其
初始姿态:图 1 的 Y 轴指向地磁北极,Z 轴竖直向上。













评论0