class2-相机模型与对极几何1

需积分: 0 154 浏览量
更新于2022-08-03
收藏 1.53MB PDF 举报
【针孔相机模型】
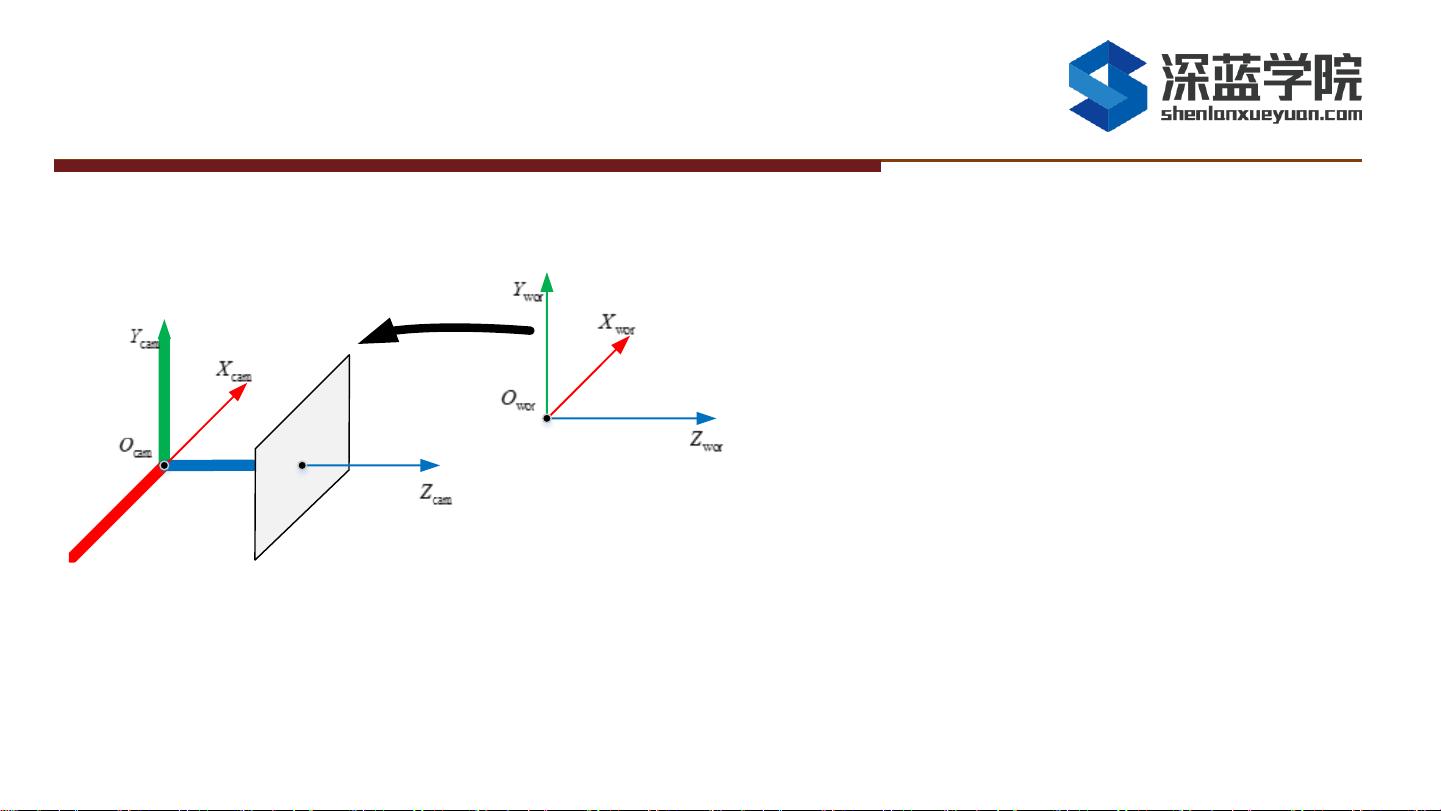
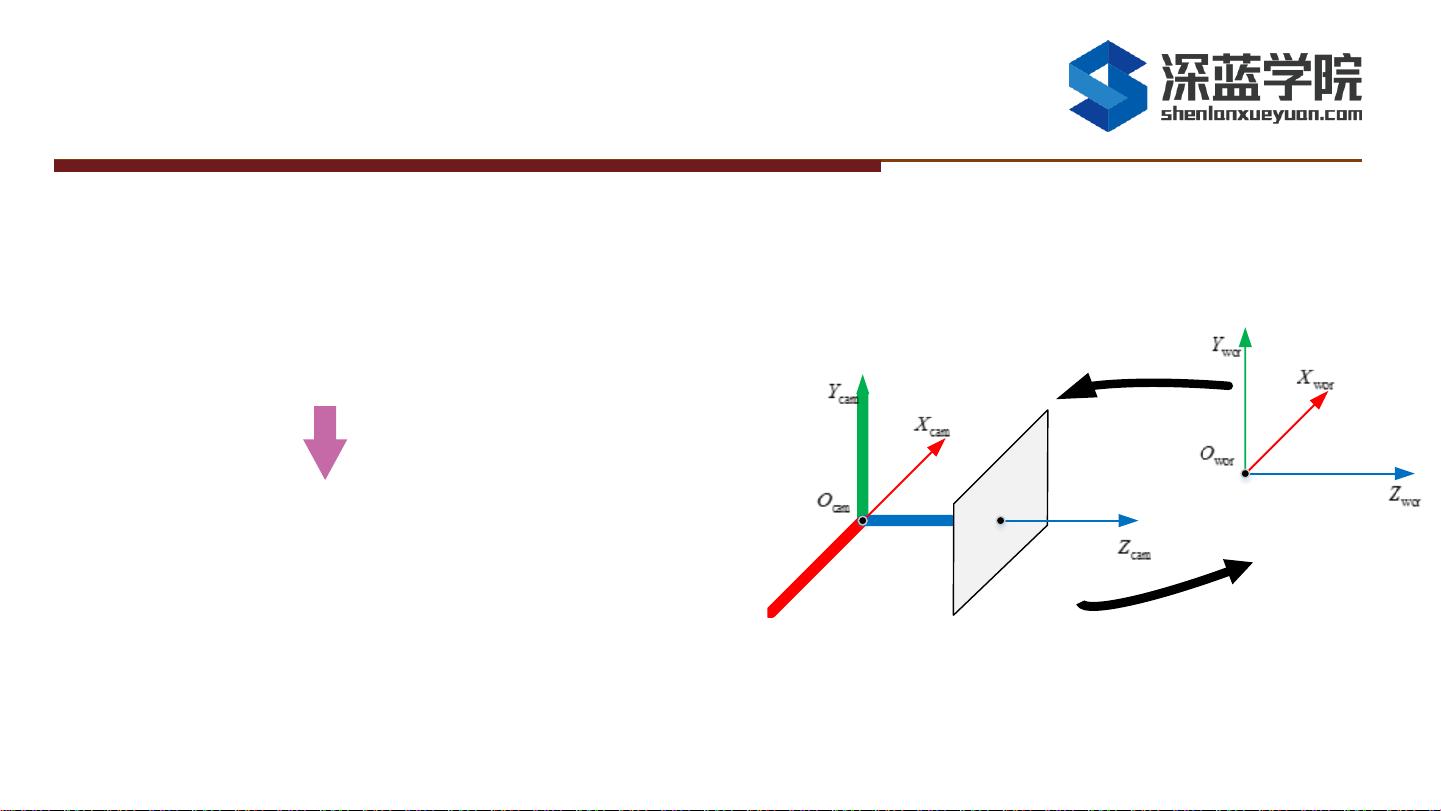
针孔相机模型是计算机视觉和图像处理中的一种基本概念,它描述了光线如何通过相机的透镜系统并在传感器(如CCD)上形成图像的过程。在这个模型中,假设相机是一个理想的针孔,即光线经过一个非常小的孔径,不考虑镜头的形状和其他光学效应。真实世界的三维点X在相机内部被映射到二维图像平面上的点(p_x, p_y),这个映射关系可以通过一系列的数学变换来表达。
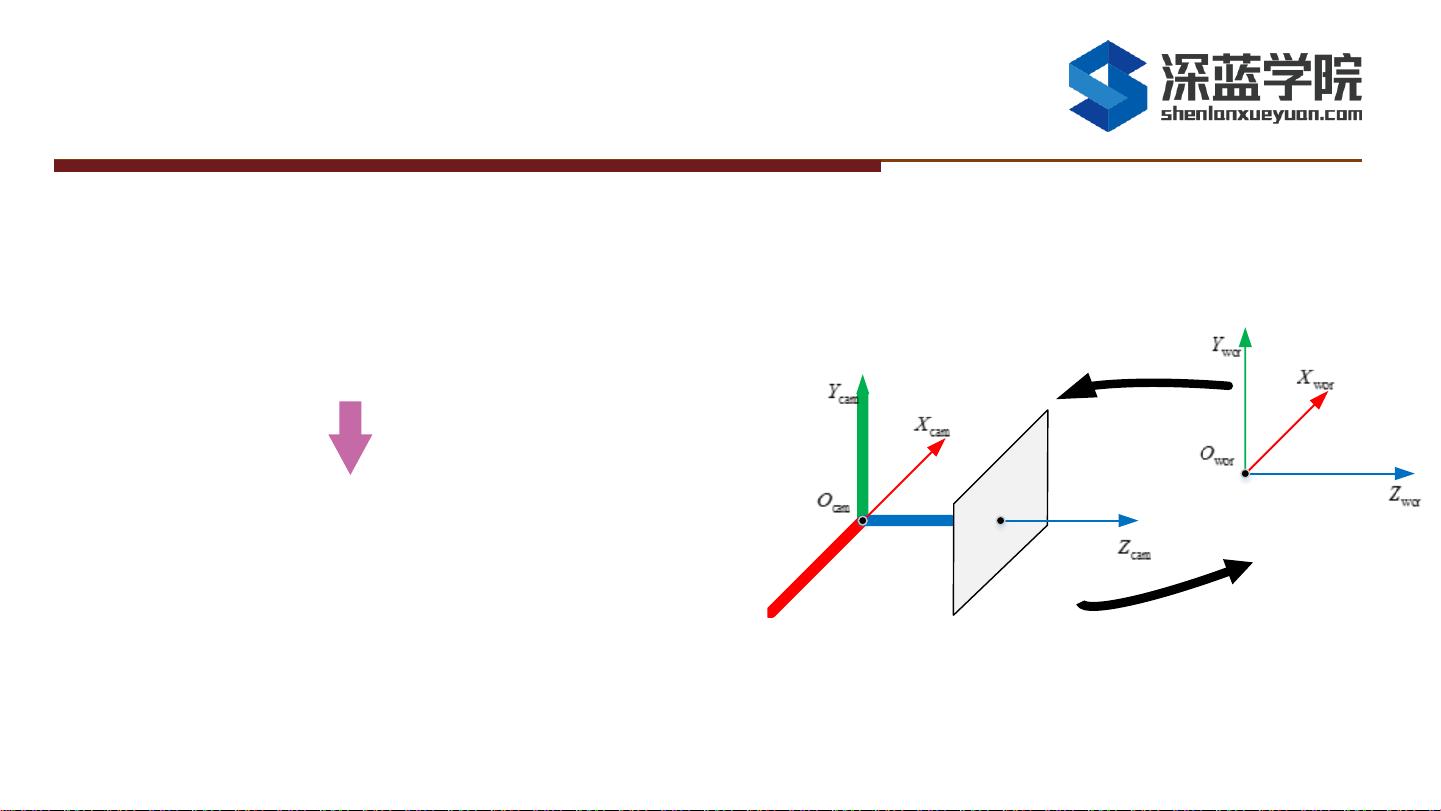
相机坐标系到世界坐标系的转换涉及到相机的外参数,包括刚体变换(平移T和旋转R)。相机中心O_c在世界坐标系中的位置由向量T_wc表示,而相机坐标系的Z轴方向由旋转矩阵R_wc的第三列决定。相机的朝向由-R_t的第三行给出,表示相机坐标系Z轴在世界坐标系中的方向。
【径向畸变】
实际相机的透镜系统并不完美,会导致光线在接近边缘时发生弯曲,这种现象称为径向畸变。它使得原本应该是直线的图像边沿在图像中呈现出弧形。径向畸变通常用几个系数(k_1, k_2, k_3等)来近似描述,这些系数可以通过图像上的特征点匹配和最小二乘法来估计。畸变矫正可以通过将图像点坐标(x, y)修正为(u, v)来进行,修正公式包含k_1, k_2等畸变系数。
【2D-2D: 对极几何】
对极几何是研究两幅图像之间对应关系的重要理论,尤其在立体视觉和多视图几何中。对极约束描述了在两个不同视图中对应点之间的几何关系,它基于相机间的相对位置和方向。本质矩阵和单应矩阵是描述这种关系的数学工具,本质矩阵E包含了两相机的相对旋转和平移信息,而单应矩阵H描述了一个平面在不同视图中的映射。直接线性变换法(DLT)是一种求解这些矩阵的常用方法,通过找到一组满足对极约束的点对,可以计算出本质矩阵或单应矩阵。
针孔相机模型和对极几何是三维重建和视觉定位的基础,它们使得我们能够从二维图像中恢复出三维信息,广泛应用于机器人导航、增强现实和3D建模等领域。而理解并处理径向畸变对于提高图像质量和进行精确的图像处理任务至关重要。
192 浏览量
119 浏览量
164 浏览量
132 浏览量
2024-09-07 上传
2014-06-03 上传
2019-05-11 上传
146 浏览量
2018-08-24 上传
115 浏览量
175 浏览量
2017-07-21 上传
192 浏览量
2021-03-14 上传
2021-03-31 上传
109 浏览量
2022-05-31 上传
189 浏览量
2022-09-23 上传
135 浏览量
140 浏览量
166 浏览量
资源评论


天使的梦魇
- 粉丝: 39
- 资源: 321









最新资源
- 电子商务_网上商城管理系统_用户身份验证_便捷购物_1740825436.zip
- 商城管理_System_SCUM_1740825333.zip
- 智能公交系统电子站牌设计_STM32_微信小程序_毕业设_1740825532.zip
- 全国地图 省GeoJson 市GeoJson
- MATLAB实现领航追随法与人工势场法融合的车辆编队避障控制策略,MATLAB领航追随法融合人工势场法的车辆编队避障控制策略实现研究,MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的
- 迪恩在线教育素材培训课程网站源码 discuz内核完整资料带数据
- 基于手性光学效应的连续介质束缚态研究:从三维图谱到Q因子图的所见即所得超表面复现分析,基于Comsol模拟:三次谐波效应下的本征手性BIC超表面研究-远场偏振图、手性透射曲线与光学响应的可见性分析
- 和材料性能分析** COMSOL 培训视频,深入解析多物理场仿真技术与应用 **深入解析COMSOL多物理场仿真技术与应用:从结构力学到化学反应的全面分析**,界面仿真和流控模拟 COMSO
- 找高手:应该如何训练工程造价的大模型?
- NOIP2009年提高组NOI Linux和Cena测评环境与数据
- 手把手项目实践:用Labview制作一个电子秤的485上位程序
- golang画图库演示程序源码
- IntelCacheAccelerationSoftware,傲腾加速软件
- 昆仑通态MCGS与欧姆龙E5CC温控器通讯:PID控制及输出启停功能实现,欧姆龙E5CC温控器与昆仑通态MCGS的PID通讯方式及输出启停(KUNL-1),昆仑通态MCGS与欧姆龙E5CC温控器通讯+
- 补码计算与进制转码学习
- 《从0到1:手把手教你OpenCV下载安装秘籍》
