集装箱码头RTG的防摇技术_李文泽1

需积分: 0 52 浏览量
更新于2022-08-03
收藏 2.1MB PDF 举报
在现代港口物流领域,集装箱码头的操作效率和安全性一直是研究和关注的焦点。在众多装卸设备中,轮胎式集装箱起重机(RTG)因其灵活性和高效率在堆场作业中占据着重要地位。然而,在装卸过程中,提升的集装箱极易受到风力、摩擦等因素的影响而产生摆动,这不仅影响了作业效率,也潜藏着引发安全事故的可能。因此,集装箱码头RTG的防摇技术显得尤为重要,它直接关联到港口作业的安全性和效率。
防摇系统的构建成为了应对这一问题的关键。其核心目标是尽可能地减少或消除吊具在装卸过程中的摆动,确保吊具相对于小车中心的稳定状态。通过防摇控制系统的介入,可以显著提高RTG的工作精度和效率,实现集装箱的快速、精确定位,同时减轻操作人员的劳动强度,降低对操作员经验的依赖,从而整体提升作业的安全性和自动化水平。
在进行RTG防摇系统分析时,研究人员通常会简化模型,以排除一些非关键因素的干扰,比如假设大车是固定不动的,忽略风力和空气阻尼的影响,以及起升钢丝绳的质量等。简化后的模型主要关注小车牵引力、吊重的偏摆以及小车与轨道间的摩擦力。通过对小车-吊重偏摆动力学模型的建立,可以推导出一系列微积分方程,用以进一步分析吊重的受力情况。这些分析有助于在水平和垂直方向上建立动力学平衡方程,并最终推导出小车-吊重偏摆系统的线性化模型。简化模型表明,吊重的摇摆运动具有周期性和可预测性,且其摇摆程度与小车运行的加速度成正比。
防摇技术的发展对于优化港口作业流程、提升港口吞吐能力以及保障作业安全具有深远的影响。随着自动化和智能化技术的不断发展,未来的防摇系统将有望达到更高的性能,其适应工况的能力将更强,对人为干预的依赖度将更低,进而进一步提升港口作业的效率和安全性。在这一过程中,设备制造商研发更先进的防摇技术亦是提升产品竞争力的关键途径。
集装箱码头RTG的防摇技术是确保装卸作业平稳进行的核心技术之一。随着科技的进步和研究的深入,未来集装箱码头的作业将变得更加高效、安全,自动化和智能化水平也将不断提高。这不仅对港口物流产业的发展具有重要意义,也对提升港口作业安全性的国际标准和行业规范有着积极的推动作用。
2018年第7期(下)/ 总第526期
217
学术研讨
1 概 述
轮胎式集装箱起重机(RTG)是目前世界各大港口集装
箱码头堆场的主要起重装卸设备, RTG 换场作业灵活,作业
活动范围广,堆场利用率高,受到广大港口码头的欢迎。
RTG 在工作的过程中,即将集装箱在大车和小车之间
进行装卸操作的过程中,很容易出现集装箱摆动的情况。
造成集装箱摆动的原因主要是风、摩擦等对处于提升状态
集装箱的扰动。这种情况是万万不能忽视的,轻则影响工
作效率,重则导致安全事故,造成生命和财产损失。因
此,业界一直都对解决这种摇摆问题的研究非常重视。起
重机在工作中,在速度不断变化的情况下并受到外力干
扰,使得吊具发生不同程度、不同方向的摆动,难以定位
而使工作循环时间加长,在影响生产效率的同时造成一定
的安全隐患,有时甚至还会由于集装箱的偏摆导致碰撞事
故的发生,最终造成严重的经济损失。
在实际的起重机工作过程中,起重机操作员起着非常
重要的作用,依靠其自身丰富的操作经验可以应对吊具摇
摆的问题,但这无疑增加了操作员的劳动强度,降低了工
作效率。并且并不是所有的操作员都具备足够的操作经
验。因此,提高起重机的自动化程度,尤其是加强自动化
的防摇、减摇操作,从而提高工作的效率及安全性,具有
非常重要的现实意义。目前,起重机吊具防摇系统研究已
经成为众多机构和厂商关注的焦点。
2 防摇系统的分析
RTG 防摇控制系统的作用主要是在短时间内减小甚至
消除吊具的摆动现象,使其相对于小车的中心竖直线处于
稳定状态(在规定允许范围内轻微摆动)。RTG 防摇控制
系统一方面提高了起重机的工作效果和工作效率,使集装
箱的起重、定位、码放都更加快速、准确、安全;另一方
面也很大程度的减轻了操作人员的劳动强度,一定程度上
避免了对操作员经验的依靠。
RTG 是一个非常复杂的系统,为了分析其本质,并在
满足工程实用和允许范围内对其进行简化处理 :
在 RTG 的工作过程中,一般情况下大车都是固定不
动的,因此大车的运动因素可以不考虑;
风力和空气阻尼的影响忽略不计;
吊重始终在平面做水平运动;
起升钢丝绳的质量忽略不计。
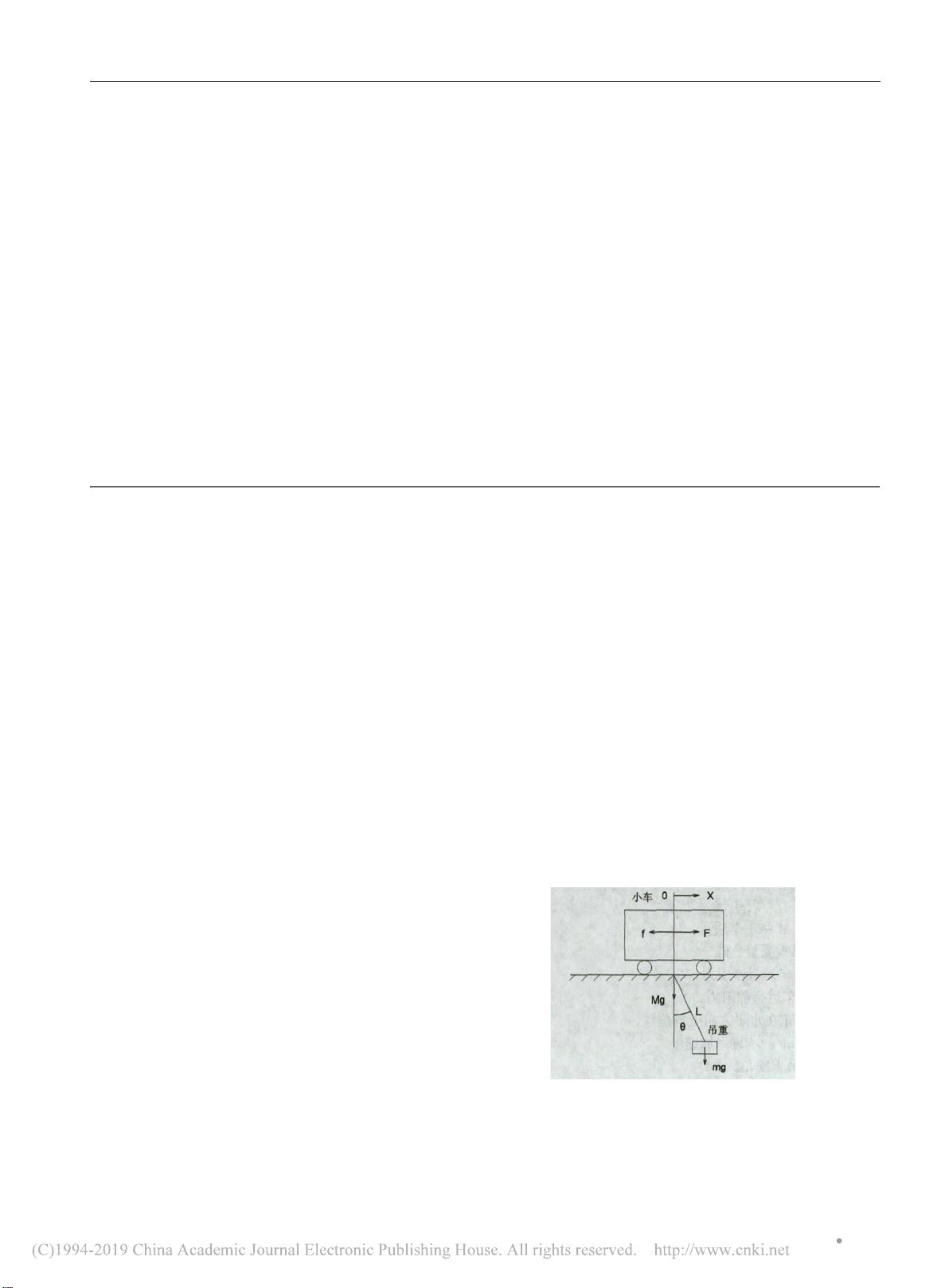
考虑小车运行牵引力、吊重的偏摆及小车与轨道间的
摩擦阻力,分析得出如下图所示的小车 - 吊重偏摆系统的
简化力学模型:
图 1 小车 - 吊重偏摆动力学模型
其中,
M——小车质量;
m——吊重质量;
L——起升钢丝绳的长度;
■■ 李文泽
(诺尔起重设备(中国)有限公司)
摘 要:
RTG摇防的重要性,防摇系统的简易分析,防摇系统的方法。
关键词:
RTG;防摇系统
DOI编码:
10.3969/j.issn.1002-5944.2018.14.115
集装箱码头RTG的防摇技术
下载后可阅读完整内容,剩余2页未读,立即下载
资源评论


刘璐璐璐璐璐
- 粉丝: 36
- 资源: 326









最新资源
- 20241226_243237026.jpeg
- f81f7b71ce9eb640ab3b0707aaf789f2.PNG
- YOLOv10目标检测基础教程:从零开始构建你的检测系统
- 学生实验:计算机编程基础教程
- 软件安装与配置基础教程:从新手到高手
- IT类课程习题解析与实践基础教程
- 湖南大学大一各种代码:实验1-9,小班,作业1-10,开放题库 注:这是21级的,有问题不要找我,少了也不要找我
- 湖南大学大一计科小学期的练习题 注,有问题别找我
- unidbg一、符号调用、地址调用
- forest-http
- christmas-圣诞树代码
- platform-绿色创新理论与实践
- christmas-圣诞树
- 数据分析-泰坦尼克号幸存者预测
- 字符串-圣诞树c语言编程代码
- learning_coder-二叉树的深度
