2概要设计1
需积分: 0 77 浏览量
2022-08-08
20:50:32
上传
评论
收藏 151KB DOCX 举报

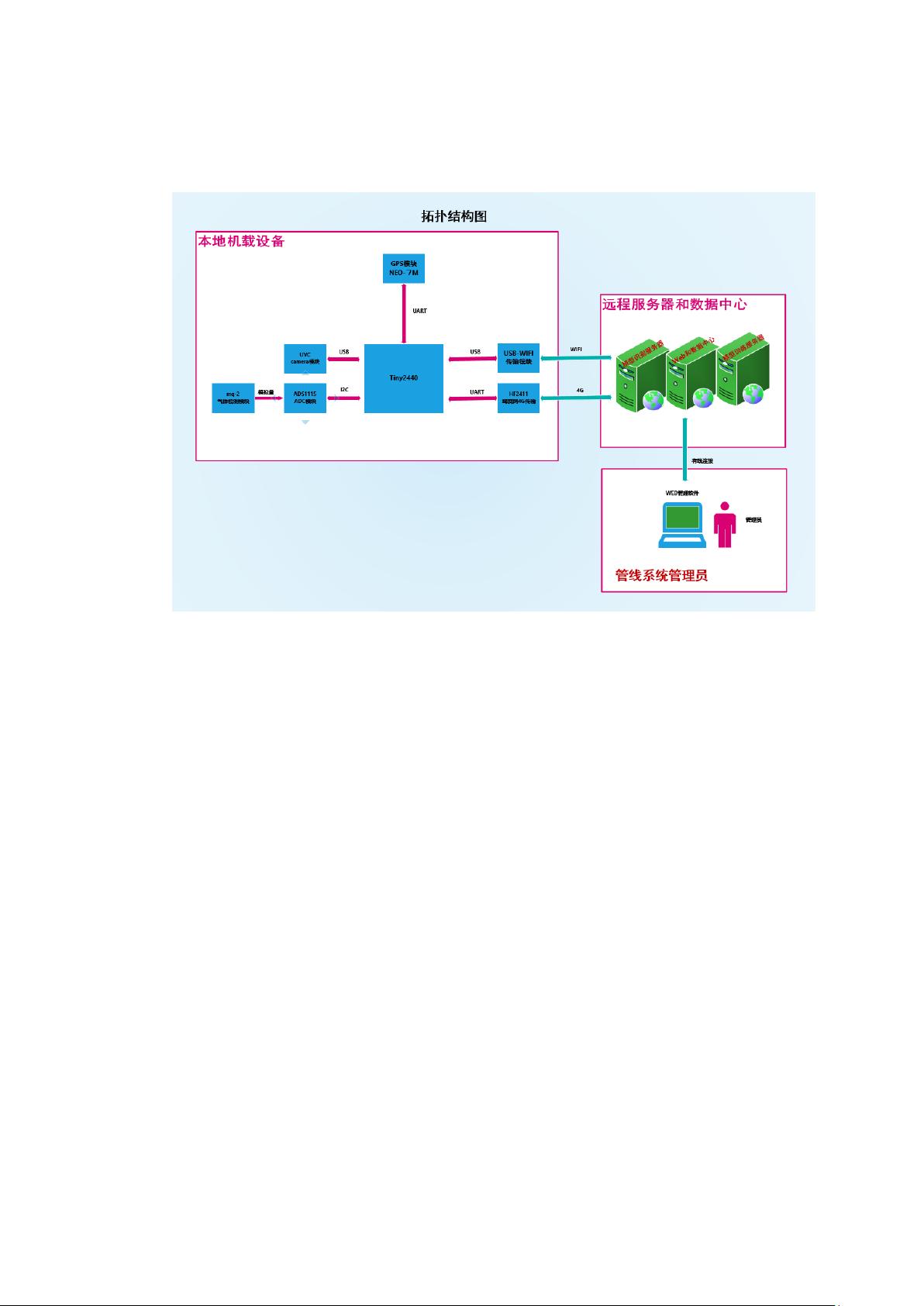
1. 系统拓扑结构
系统大体分为本地机载设备, 远程服务器和数据中心, 管线系统管理员
a) 本地机载设备的工作任务是采集所有的当前无人机所在物理信息, 并将
信息通过 WIFI/4G 传输模块上传到远程服务器.
b) 远程服务器的工作任务有三个, 接受并解析终端机载设备发送的物理信
息, 根据已经训练好的模型去识别当前位置的管道异常和异常级别, 根
据识别结果将相应字段存入数据库
c) 管线系统管理员部分相当于是原来人工巡检管道的部分工作人员, 只需
要查看 Web 页面出现的异常情况即可
2. 硬件选型接口设计
a) 核心板---Tiny2440
i. USB2.0*2(接 USB 摄像头, USB-WIFI)
ii. UART*1(串口 GPS)
iii. I2C*1(接 ADC 模块输出)
b) 费加罗可燃气体检测---TGS2610 模块
i. 5V 供电, 模拟量 0.5V-4.5V
ii. 高低电平输出
c) 数模转换模块---ADS1115
i. 0.5-4.5V 模拟量I2C 数字量
d) 串口 GPS 模块---G7020
e) USB 摄像头模块---USB Video Class(UVC 摄像头)
3. 流程结构设计
整个系统结构分为信息采集部分, 本地信息处理部分, 本地数据发送













评论0