c620电调使用程序说明书1

需积分: 0 85 浏览量
更新于2022-08-03
收藏 905KB PDF 举报
【C620电调使用程序说明书1】
本说明书主要涉及C620电调的Demo程序,该程序用于通过PWM或CAN两种控制模式驱动M3508电机,使用RoboMaster主控开发板作为控制平台。STM32F427作为主控MCU,采用Keil5 μVision IDE作为开发环境,并利用STM32CubeMX工具和STM32 HAL固件库生成初始化代码。
你需要访问STM32CubeMX的下载页面,可能需要注册ST账号。STM32CubeMX是一款强大的配置工具,它能够自动生成基于STM32系列MCU的初始化代码。在网页中,你可以找到“EMBEDDED SOFTWARE”部分,这里包含HAL固件库包,比如STM32CubeF0。确保已安装JRE(Java Runtime Environment),因为STM32CubeMX运行需要这个平台。
安装固件库时,下载zip包,打开STM32CubeMX,通过"help->install new libraries->from local…"路径导入并安装。成功安装后,对应的器件系列固件库版本号会变为绿色。
硬件连接方面,C620电调的三相输出线和7-Pin数据线需连接至M3508电机。控制方式有两种:CAN或PWM。若选择CAN控制,将CAN信号线连接至电调和RM主控板的CAN1端口;若选择PWM,连接PWM信号线至相应PWM端口(C1,C2,C3或C4)。注意,不能同时连接CAN和PWM信号线,否则可能导致电调控制失效。
电源线连接RM主控板的24V电源端口,检查无误后通电。示例程序提供了PWM和CAN协议的使用方法,其中TIM5用作PWM信号端口。
程序框架方面,由STM32CubeMX生成的Keil5工程已按功能分组。BSP(Board Support Package)组中,你可以添加自己的代码文件。工程结构包括HAL层、Middleware组件(如FreeRTOS)、ARM核心CMSIS等。在BSP组中,添加bsp_can.c/h、pid.c/h等文件,用于CAN滤波器初始化、接收和发送等功能,以及PID参数初始化和计算。控制代码主要在StartDefaultTask函数中实现,通过宏定义CAN_CONTROL和PWM_CONTROL切换控制方式。
当使用CAN控制时,电调将对电机实行电流闭环控制,需要从电调获取电机转速并实现PID调节。而PWM控制则不需要电流闭环,但可以调整电机转速。根据实际情况选择合适的控制模式,并参照本说明书提供的步骤进行设置和编程,即可完成C620电调的控制。

C620 电调 Demo 程序说明
Demo 功能说明
该 Demo 程序以RoboMaster 主控开发板为控制板,以两种控制模式(PWM 或 CAN)
来驱动 C620 电调控制 M3508 电机。通过按键交互,来改变电机的转速。
环境平台介绍
本程序以 RoboMaster 主控开发板(以下简称 RM 主控板)为例进行演示.如图 1
图 1. RoboMaster 主控开发板(链接)
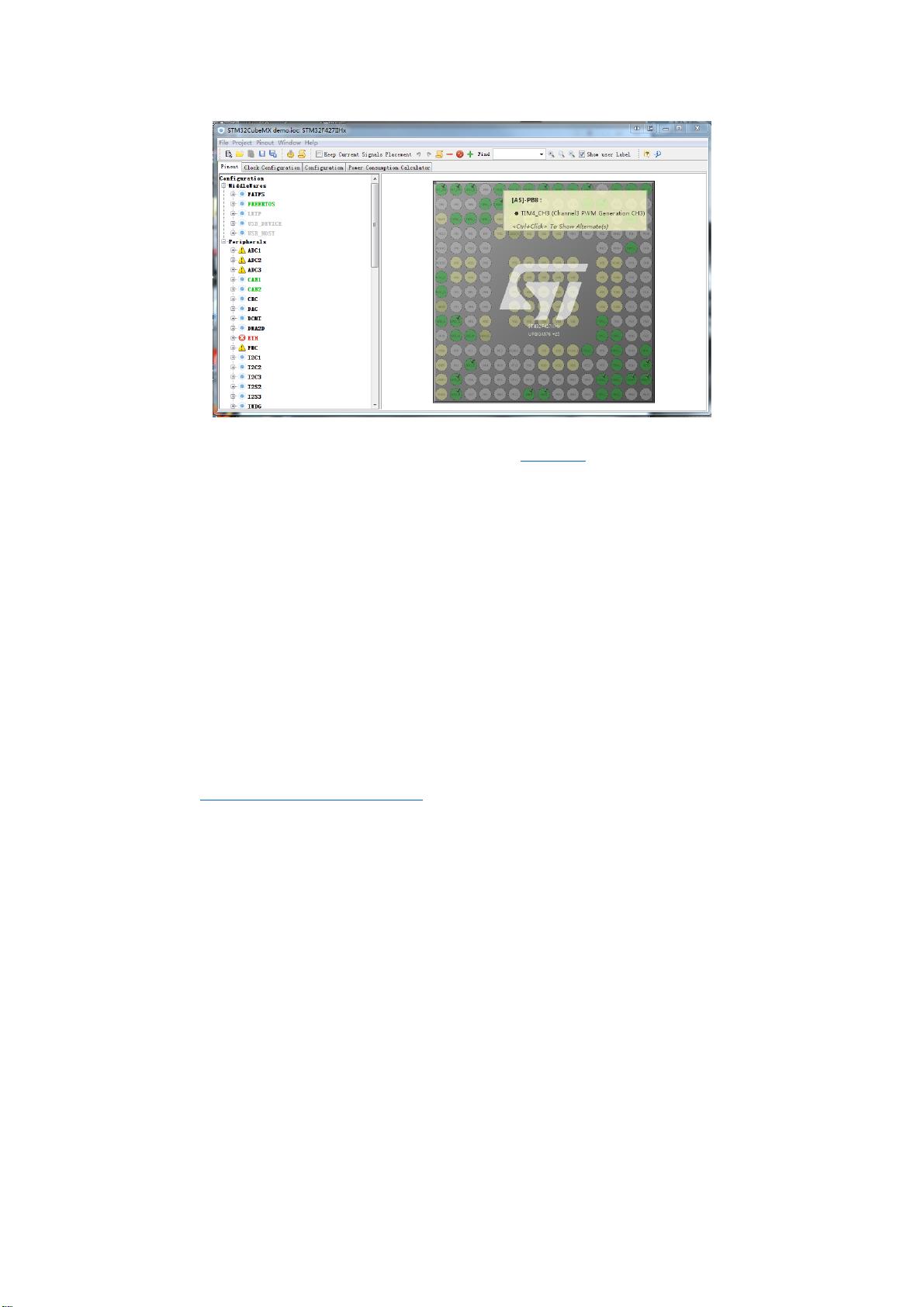
使用 Keil5 μVision IDE 作为开发环境.主控 MCU 是 ST 的 STM32F427.该 STM32 系
列单片机除了普通固件库以外,还具有 STM32CubeMX 工具和 STM32 HAL 固件库.本文就
使用了 STM32CubeMX 工具与其对应的 stm32F4 系列 firmware package 生成外设驱动
的初始化代码.软件预览图如图 2 所示:
剩余6页未读,继续阅读
165 浏览量
191 浏览量
2018-11-29 上传
198 浏览量
147 浏览量
2021-02-17 上传
2020-09-16 上传
2023-01-16 上传
154 浏览量
117 浏览量
2022-08-08 上传
2018-07-25 上传
资源评论


玛卡库克
- 粉丝: 34
- 资源: 309









最新资源
- 使用网络协议分析器捕捉和分析协议数据包-计算机网络实验报告.docx
- 毕业设计报告撰写指南与模板
- Matlab 车辆配送路径规划问题 四大算法解决旅行商问题(TSP) CVRP CDVRP VRPTW tsp:旅行商问题,寻找最短闭合路径 cvrp:带容量约束的车辆路径规划 dvrp:带距离约束
- 名医奇方秘术 第三集.pdf
- 名医奇方秘术 第二集.pdf
- 名医类案.pdf
- 明清中医珍善孤本精选(九) 医騐录二集序.pdf
- 明清中医珍善孤本精选(九) 医騐录二集自序.pdf
- 明堂浅义-气功经络学浅说.pdf
- 明清中医珍善孤本精选(九) 医医十病有序.pdf
- 南平专区中医药学术研究参考资料 第贰期.pdf
- 难经经释——徐灵胎.PDF
- 18485395156-20241220201205.amr
- Java多线程编程的核心概念和技术详解
- 基于java+ssm+mysql的学生资助管理系统开题报告.doc
- 基于java+ssm+mysql的学生资助管理系统任务书.doc
