2-丁天琛-Lamps_Location-Aware_Moving_Top-k_PubSub1
需积分: 0 95 浏览量
2022-08-04
13:38:15
上传
评论
收藏 2.39MB PDF 举报

1041-4347 (c) 2020 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2020.2979176, IEEE
Transactions on Knowledge and Data Engineering
IEEE TRANSACTIONS ON KNOWLEDGE AND DATA ENGINEERING, VOL. 14, NO. 8, AUGUST 2015 1
Lamps: Location-Aware Moving Top-k Pub/Sub
Shunya Nishio, Daichi Amagata, Member, IEEE, Takahiro Hara, Senior Member, IEEE
Abstract—Huge amounts of spatio-textual objects, such as geo-tagged tweets, are being generated at an unprecedented scale,
leading to a variety of applications such as location-based recommendation and sponsored search. Many of these applications need to
support moving top-k spatio-textual subscriptions. For example, while walking, a tourist issues a moving subscription and looks for
top-k advertisements published by nearby shops. Unfortunately, existing methods that monitor the results of spatio-textual
subscriptions support only static top-k subscriptions or moving boolean subscriptions.
In this paper, we propose a novel system, called Lamps (Location-Aware Moving Top-k Pub/Sub), which continuously monitors the
top-k most relevant spatio-textual objects for a large number of moving top-k spatio-textual subscriptions simultaneously. To the best of
our knowledge, this is the first study of a location-aware moving top-k pub/sub system. As with existing works on continuous moving
top-k subscription processing, Lamps employs the concept of a safe region to monitor top-k results. However, unlike with existing works
that assume static objects, top-k result updates may be triggered by newly generated objects. To continuously monitor the top-k results
for massive moving subscriptions efficiently, we propose SQ-tree, a novel index based on safe regions, to filter subscriptions whose
top-k results do not change. Moreover, to reduce the expensive cost of safe region re-evaluation, we develop a novel approximation
technique for safe region construction. Our experimental results on real datasets show that Lamps achieves higher performance than
baseline approaches.
Index Terms—Pub/Sub, Top-k queries, Moving queries, Spatio-textual objects
F
1 INTRODUCTION
B
ECAUSE of the prevalence of social networks and GPS-
enabled mobile devices, huge amounts of objects with
both spatial and textual information, referred to as spatio-
textual objects, have been generated in a streaming fashion.
This has led to the popularity of location-aware pub/sub
systems in many applications, such as location-based recom-
mendation [1] and sponsored search [2]. In such a system, a
large number of users register their interests (e.g., keywords
and locations) as spatio-textual subscriptions. Then, the
system delivers a stream of spatio-textual objects (e.g., geo-
tagged tweets, e-coupons, and advertisements) generated
by publishers (e.g., restaurants) to the relevant subscrip-
tions. Various location-aware pub/sub systems have been
proposed [3], [4], [5], [6], [7]. Most of them focus on boolean
matching, thereby users may receive few matching objects
or may be overwhelmed by a huge volume of matching
objects. In such a situation, a top-k subscription, which
can control the size of the objects to be received, is useful.
Unfortunately, existing works focus on static subscriptions
and cannot support moving subscriptions efficiently. Note
that many real-world applications need to support moving
subscriptions [5], [8], [9], [10], [11]. For example, while walk-
ing, a tourist looks for top-k advertisements published by
nearby shops. Because he/she is walking, his/her location
(subscription location) changes continuously.
Motivated by the fact that none of the current systems
can support moving top-k subscriptions against streaming
objects, in this paper, we propose a novel system, called
Lamps (Location-Aware Moving Top-k Pub/Sub), which
• The authors are with the Department of Multimedia Engineering,
Graduate School of Information Science and Technology, Osaka Uni-
versity, Suita 565-0871, Japan. E-mail: {nishio.syunya, amagata.daichi,
hara}@ist.osaka-u.ac.jp.
Manuscript received April 19, 2005; revised August 26, 2015.
: e-coupon
: user (subscription)
: subscription keywords
sushi, tea
coffee
Japanese
ramen
Keywords
sushi, Japanese
salmon
coffee
Japanese,
udon
, soba
seafood, beef
udon, tofu
sushi, tea
Newly published.
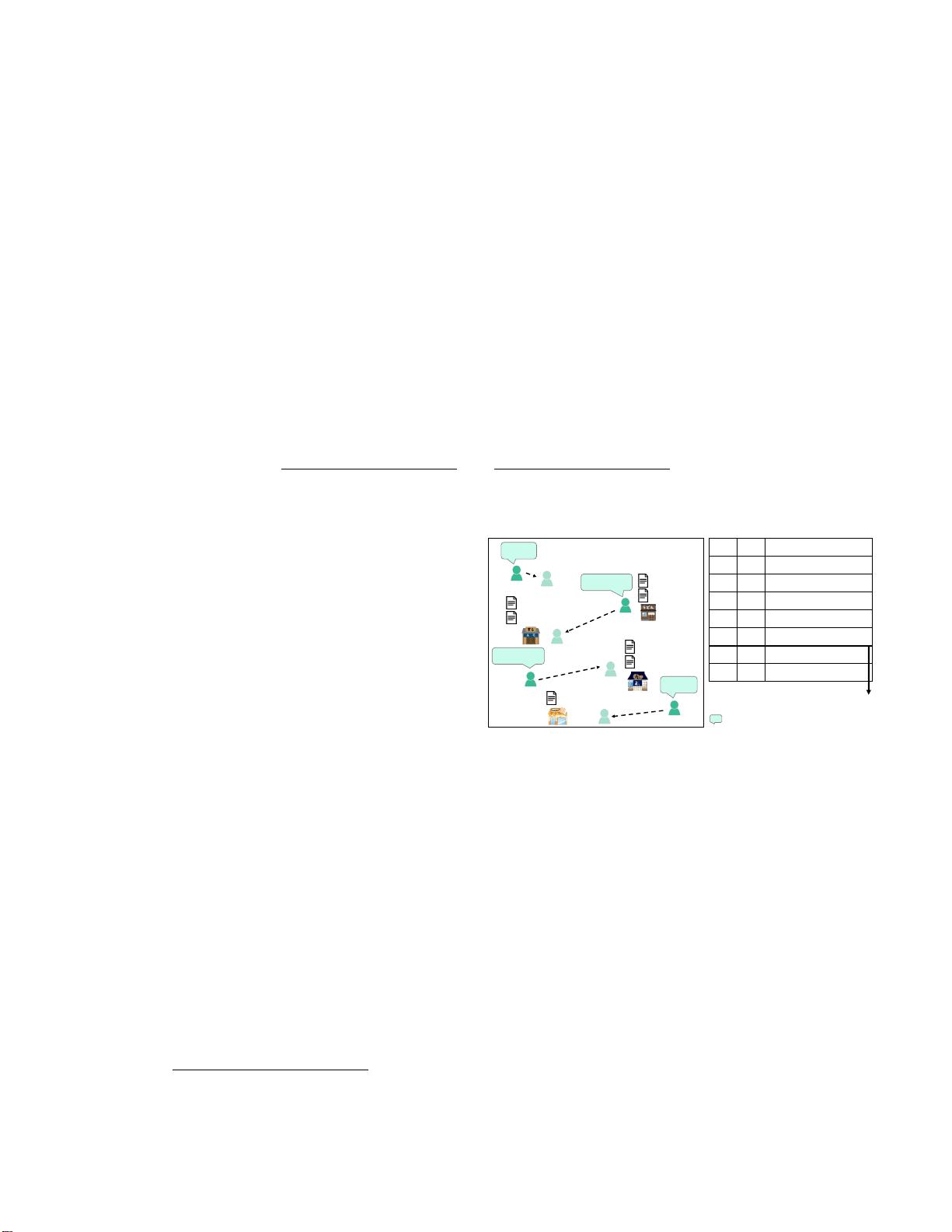
Fig. 1: A location-aware moving top-k pub/sub system. At
ts = 3, o
6
and o
7
are newly published and each user moves
to the tip of the arrow.
continuously monitors the top-k most relevant spatio-
textual objects for a large number of moving top-k spatio-
textual subscriptions simultaneously. Specifically, for each
subscription, we score objects based on their spatial and
textual similarities, and the top-k results are continuously
maintained against streaming objects (i.e., object generations
and expirations) and the movements of users.
Example 1. Fig. 1 shows an example of a location-aware
moving top-k pub/sub system that delivers e-coupons
to potential consumers. In this example, there are four
users (subscriptions) and four restaurants (publishers)
that continuously generate e-coupons. Each restaurant
can generate multiple e-coupons and delete its generated
e-coupons. Each user registers his/her interest as a sub-
scription and monitors the top-1 most relevant e-coupon.
At timestamp ts = 2, we assume that five e-coupons
(o
1
- o
5
) have been published and the top-1 result for
user u
3
is e-coupon o
1
, because o
1
has the highest spatial
and textual similarities to the subscription of u
3
. In other
Authorized licensed use limited to: Shanghai Jiaotong University. Downloaded on September 22,2020 at 12:24:04 UTC from IEEE Xplore. Restrictions apply.

剩余13页未读,继续阅读













评论0