

1
基于水下机器人研究的学术论文分析报告
Research papers based on research of underwater robots
方建勇
1
(余姚,浙江 315400)
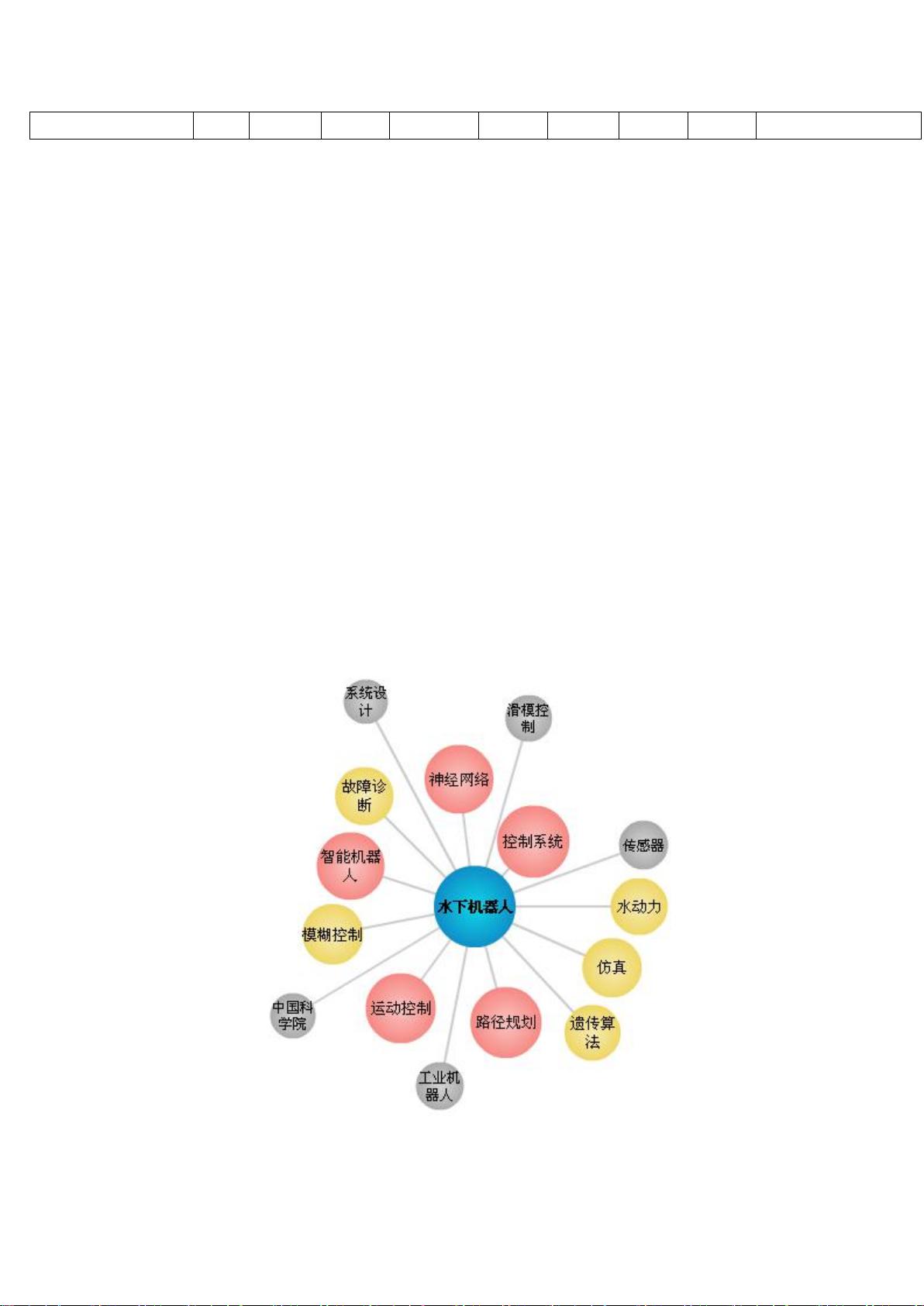
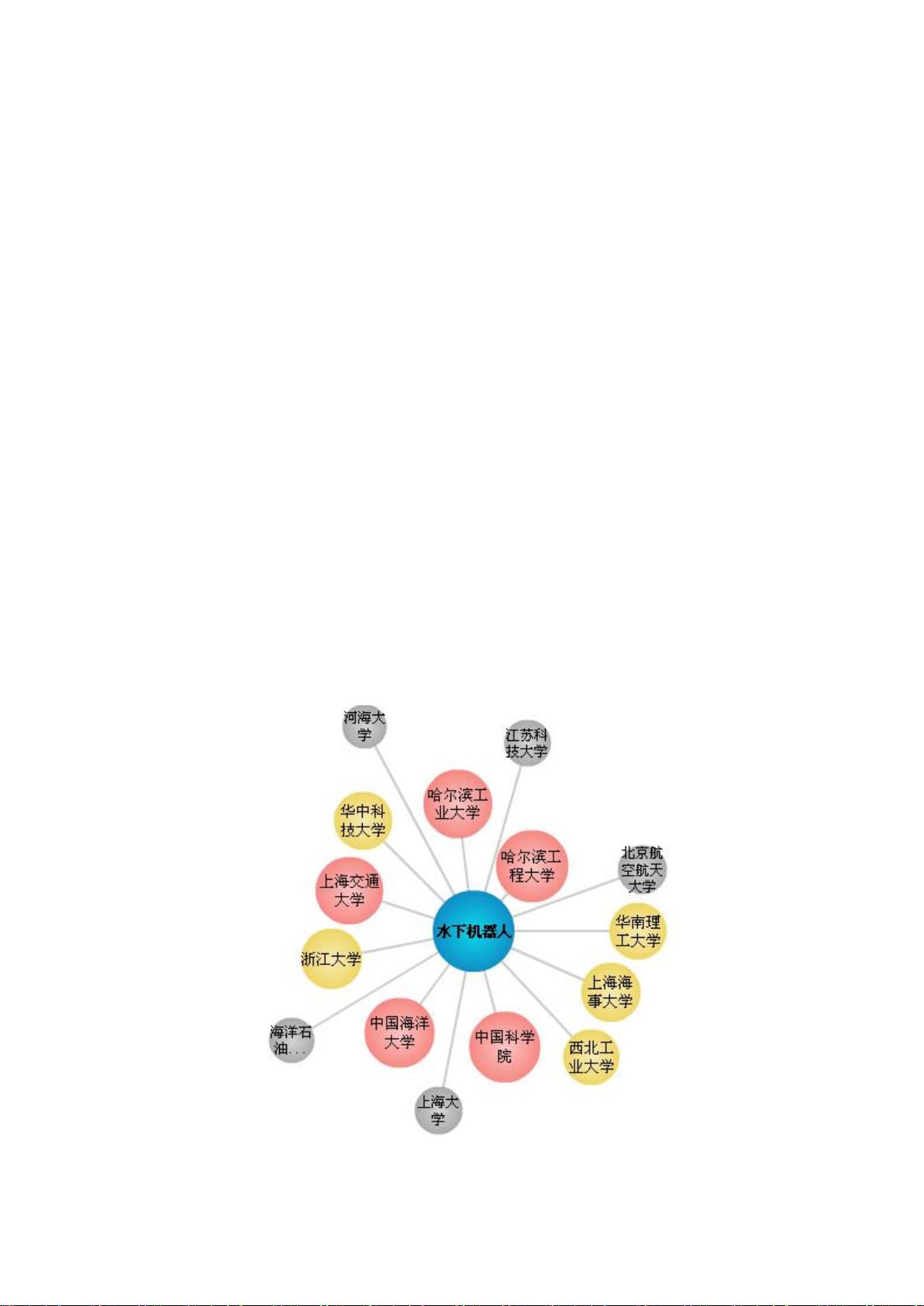
摘要:通过超星发现系统,我们大致了解到国内基于水下机器人研究的学
术论文所涉及的相关领域,可以明确地判断出哪些高校院所发表的学术论文较
多,为我们从事水下机器人研究做了比较好的指引。
关键词: 水下机器人 检测 学术论文 分析报告
Abstract:Through the superstar discovery system, we generally understand
the related fields involved in academic papers based on underwater robot research
in China. We can clearly determine which academic papers are published by colleges
and universities, and compare our research on underwater robots. Good guidance.
Key words:Underwater robots; Detection; Academic papers; Analysis report
水下机器人
2
也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水
下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工
具。
无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆
遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
1
方建勇,男,1978 年-,美国电气电子工程师学会 IEEE 会员,美国计算机学会 ACM 会员,中国工业与应
用数学学会会员,中国计算机学会会员,中国中文信息学会会员,中国物流学会会员,浙江大学数学与应
用数学专业毕业,MachineCoastline(机器海岸线)CEO&Founder。
2
百度百科水下机器人词条
剩余298页未读,继续阅读

周林深
- 粉丝: 56
- 资源: 290









最新资源
- 基于javaweb的网上拍卖系统,采用Spring + SpringMvc+Mysql + Hibernate+ JSP技术
- polygon-mumbai
- Chrome代理 switchyOmega
- GVC-全球价值链参与地位指数,基于ICIO表,(Wang等 2017a)计算方法
- 易语言ADS指纹浏览器管理工具
- 易语言奇易模块5.3.6
- cad定制家具平面图工具-(FG)门板覆盖柜体
- asp.net 原生js代码及HTML实现多文件分片上传功能(自定义上传文件大小、文件上传类型)
- whl@pip install pyaudio ERROR: Failed building wheel for pyaudio
- Constantsfd密钥和权限集合.kt
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0