msckf线下分享_qxc1

需积分: 0 151 浏览量
更新于2022-08-03
收藏 1.74MB PDF 举报
【MSCKF算法详解】
MSCKF,全称为Multi-State Constraint Kalman Filter,是一种扩展卡尔曼滤波(EKF)的变体,主要用于视觉惯性里程计(Visual-Inertial Odometry, VIO)系统中。VIO的目标是通过结合摄像头的视觉信息和惯性测量单元(IMU)的数据,实时估计移动设备的运动轨迹。MSCKF在解决传统EKF计算复杂度高、系统维度大的问题上提出了一种创新方法。
在传统的EKF-VIO中,状态向量通常包含当前位姿以及大量的地图点,这导致了高维度的系统,计算量大且效率低下。而MSCKF的核心思想是:
1. **历史位姿状态扩展**:MSCKF将过去一段时间内的位姿信息纳入滤波器状态,不再直接包含地图点,从而减少了状态维度。
2. **零空间投影**:通过零空间投影技术,可以消除测量残差中与滤波器状态无关的地图点误差,进一步降低了计算负担。
3. **测量残差浓缩**:通过再次应用零空间投影,可以压缩测量残差,优化计算效率。
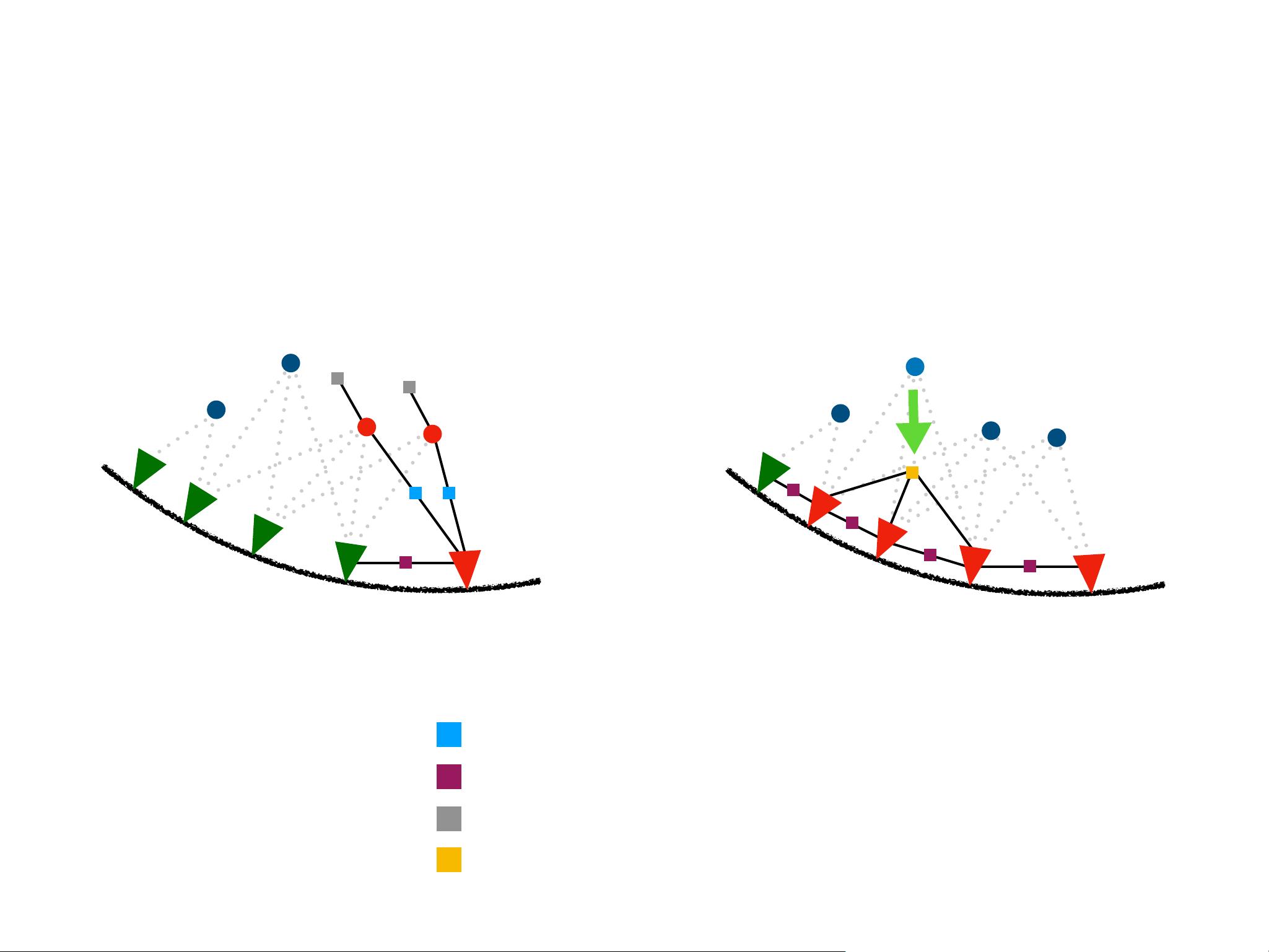
MSCKF的因子图相比于传统的EKF-VIO因子图,更简洁,主要包含当前帧位姿、重投影因素、惯性导航传播关联、地标先验因素以及可见性因素等关键元素。
随着时间的发展,MSCKF算法不断演进,出现了如SC-KF(2002)、MSCKF 2.0(2013)、RVIO(2018)和Open_VINS(2019)等变种和优化方案,分别在稳定性、鲁棒性和实时性方面取得了显著提升。
MSCKF算法的理论基础主要来自于以下几个关键论文:
1. Mourikis和Roumeliotis于2007年提出的《A multi-state constraint Kalman filter for vision-aided inertial navigation》是MSCKF的开山之作,它建立了一个完整的误差状态EKF模型,并引入了JPL四元数用于表示姿态。
2. Trawny和Roumeliotis的《Indirect Kalman filter for 3D attitude estimation》(2005)深入探讨了三维姿态估计的误差四元数基础,提供了姿态误差方程的详细推导。
3. Roumeliotis和Burdick的《Stochastic cloning: A generalized framework for processing relative state measurements》(2002)以及Mourikis和Roumeliotis的《On the treatment of relative-pose measurements for mobile robot localization》(2006)提出了状态扩展和随机克隆的概念,为利用帧间约束提供了理论支持。
4. Huang、Mourikis和Roumeliotis的《Analysis and improvement of the consistency of extended Kalman filter based SLAM》(2008)分析并改进了基于EKF的SLAM算法的一致性,对MSCKF的稳定性和一致性进行了深入研究。
这些论文不仅为MSCKF的构建提供了理论基础,也为后续的VIO研究提供了宝贵的经验和参考。通过不断的研究和优化,MSCKF算法已成为现代VIO系统中的重要组成部分,广泛应用于自动驾驶、无人机导航等领域。



180 浏览量
2023-09-15 上传
136 浏览量
111 浏览量
146 浏览量
171 浏览量
141 浏览量
141 浏览量
119 浏览量
2020-12-10 上传
201 浏览量
182 浏览量
161 浏览量
2021-12-25 上传
136 浏览量
2021-05-20 上传
2022-02-10 上传
181 浏览量
201 浏览量
151 浏览量
2023-07-27 上传
197 浏览量
125 浏览量
资源评论


我就是月下
- 粉丝: 30
- 资源: 336









最新资源
- 智慧林业应用方案PPT(47页).pptx
- 智慧林业生态大数据平台方案PPT(27页).pptx
- 智慧林业三防一体信息化平台解决方案PPT(21页).pptx
- 智慧林业信息化管理系统解决方案Word(65页).docx
- 数据驱动的林业大数据综合服务平台PPT(19页).pptx
- 智慧应急解决方案PPT(29页).pptx
- 森林消防&融合通信PPT(21页).pptx
- 智慧林业综合管理系统设计方案PPT(19页).pptx
- 森林公园智慧林业解决方案PPT(39页).pptx
- 双碳目标下自愿减排CCER项目开发与林业碳汇新机遇PPT(65页).pptx
- 智慧林业建设规划初版PPT(8页).pptx
- 编程实习心得体会PPT.pptx
- 2- 数据恢复软件 UFS Explorer
- 智慧林业信息化系统解决方案PPT(37页).pptx
- 智慧林业整体解决方案PPT(27页).pptx
- 编程实训实践心得体会PPT.pptx
