1-3讲讲义1
需积分: 0 130 浏览量
2022-08-03
19:51:26
上传
评论
收藏 193KB PDF 举报

1
Kinematics
• Transformations
• Representations
Spatial Descriptions
•Task Description
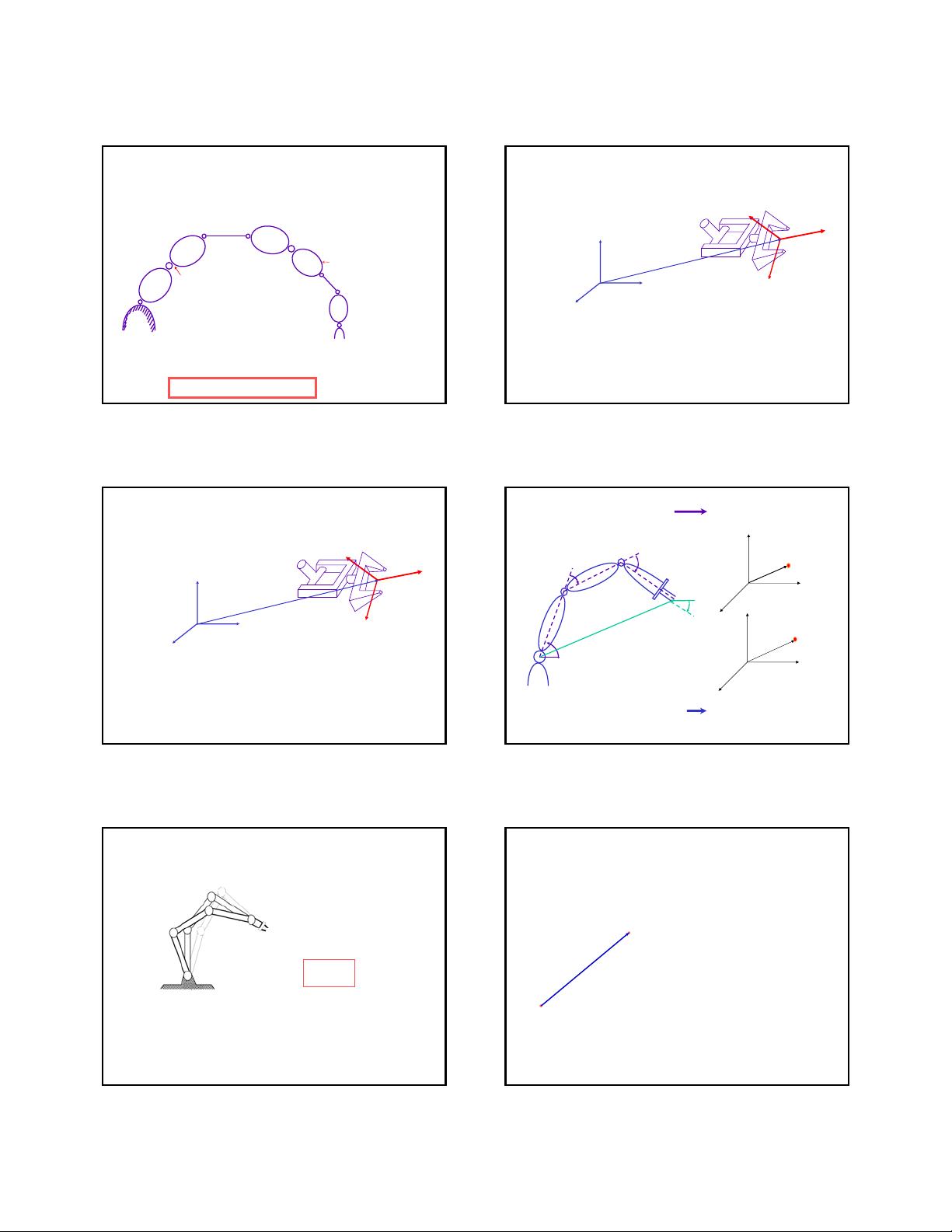
Manipulator
Prismatic Joint
L
i
n
k
i
Revolute
Joint
Base
End-Effector
n moving link
1 fixed link
Links:
Joints:
Revolute (1 DOF)
Prismatic (1 DOF)
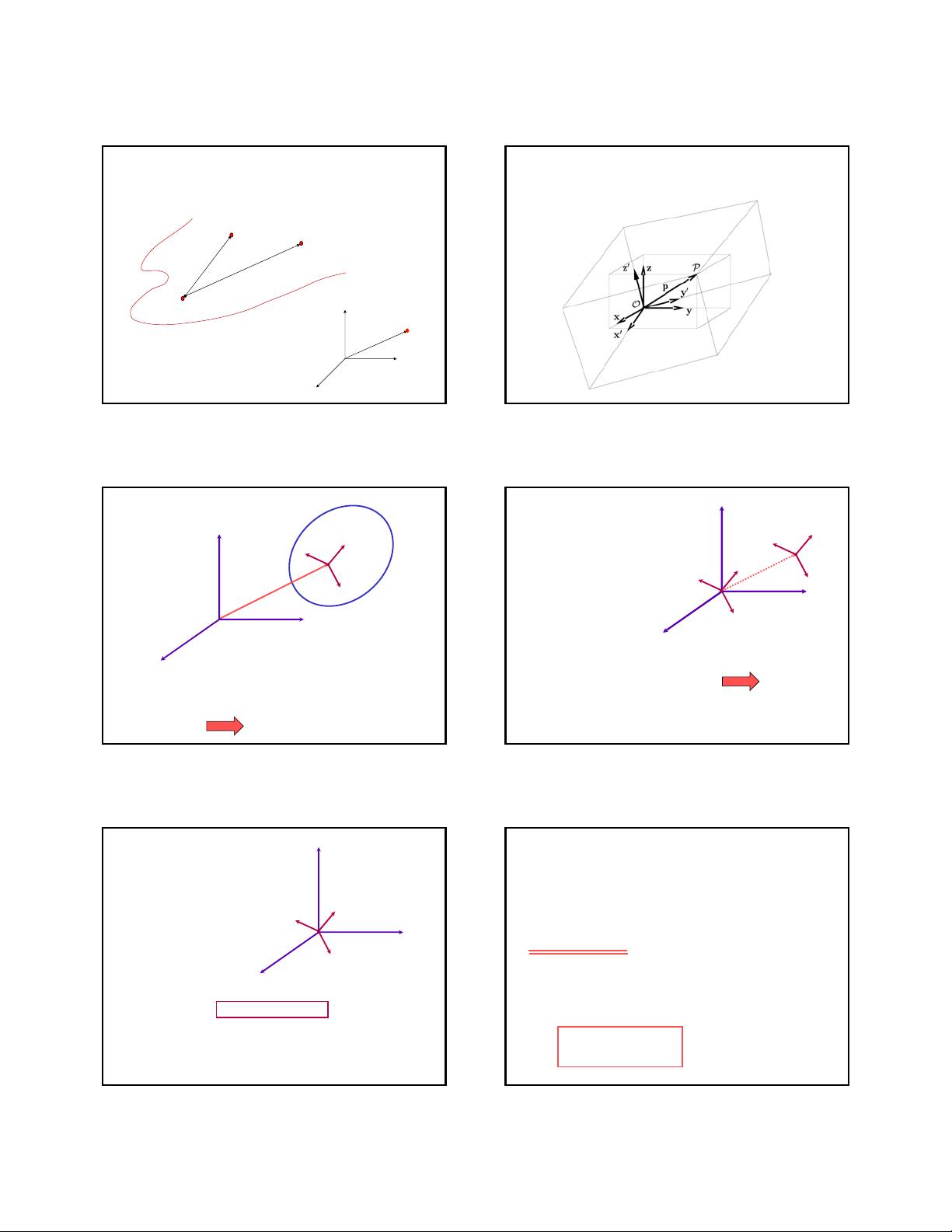
Configuration Parameters
A set of position parameters that describes
the full configuration of the system.
9 parameters/link
Generalized coordinates
A set of independent configuration parameters
Degrees of Freedom
Number of generalized coordinates
Generalized Coordinates
n moving links: 6n parameters
Generalized Coordinates
6 parameters {
3 positions
3 orientations
剩余10页未读,继续阅读













评论0