MickRobot-Controlor-原理图-V1.1.11

需积分: 0 83 浏览量
更新于2022-08-03
收藏 1.32MB PDF 举报
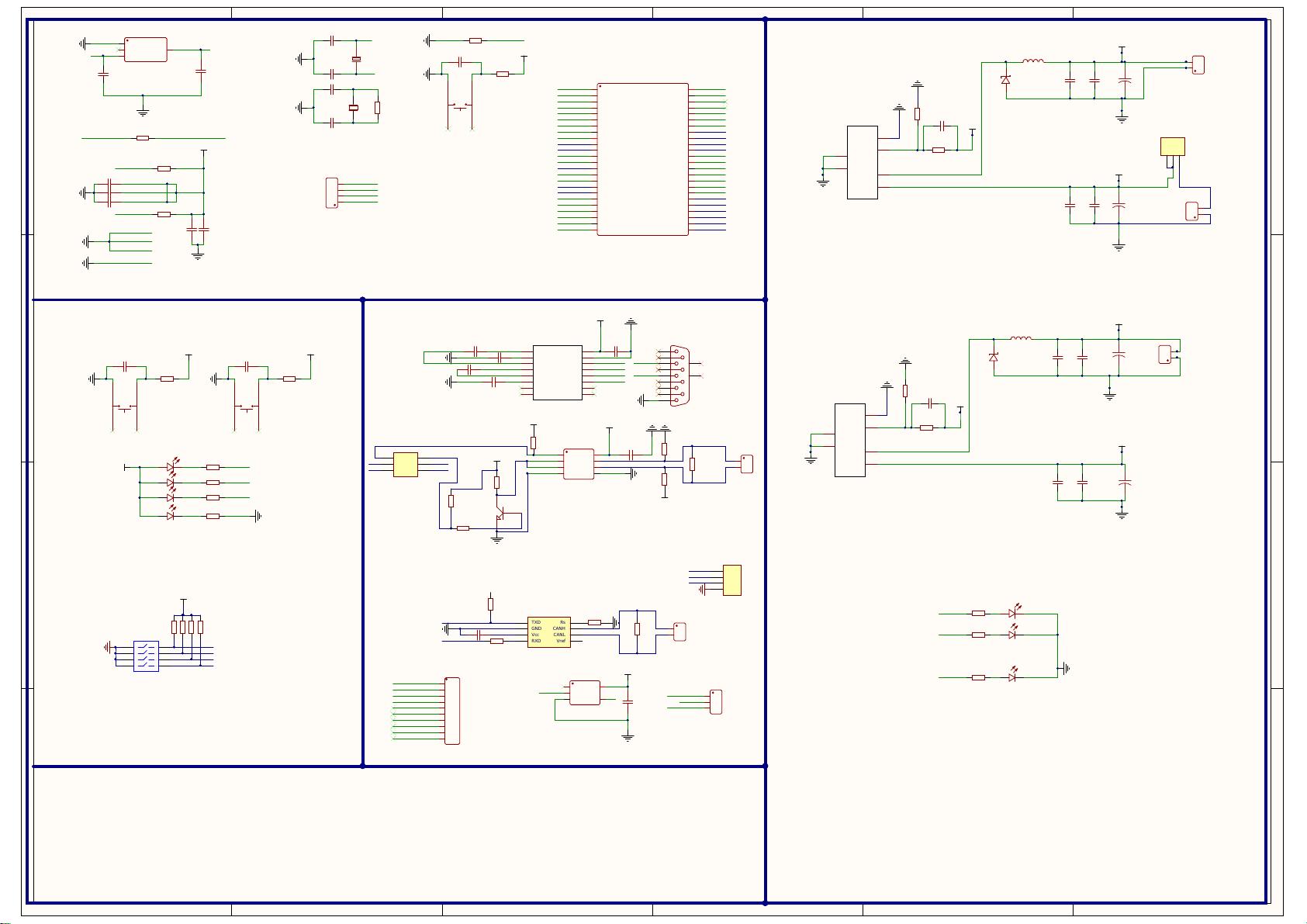
该文档涉及的是一个基于STM32微控制器的机器人控制器的硬件设计原理图,版本为V1.1.11。STM32F103C8T6是意法半导体生产的微控制器,常用于实时音视频处理等嵌入式应用。以下是主要的知识点:
1. **STM32F103C8T6微控制器**:这是控制器的核心部分,具有高性能、低功耗的特性,内含ARM Cortex-M3内核,适用于多种嵌入式应用。在电路中,它连接有晶振(X2、C1、C2、C3、C4)、复位电路(NRST、R2、R3)、电源和时钟电路。
2. **时钟电路**:包括32.768kHz的晶体振荡器(C5、C6)和主振荡器(Mosc32_in、osc32_out、osc8_in、osc8_out)。这些振荡器为微控制器提供精确的工作时钟。
3. **复位电路**:通过R2和R3电阻以及BOOT0引脚实现上电复位和软件复位功能。
4. **电源管理**:电路中有多个电源引脚(VDDA、VSSA、VDD1、VSS1、VDD2、VSS2、VDD3、VSS3、VBAT),分别对应不同的电压等级和功能区,确保了系统的稳定供电。例如,R4和R5可能用于电源监控和保护。
5. **BOOT0引脚**:用于选择启动模式,通过连接到电源或地可以决定是执行内部Flash还是系统存储器中的代码。
6. **SWD编程接口**:SWDIO和SWCLK接口用于通过SWD(Serial Wire Debug)协议进行程序下载和调试,通常连接到开发工具如JTAG适配器。
7. **UART接口**:包括UART1、UART2和UART3,用于串行通信,C1和C2电容可能用于信号平滑和噪声抑制。UART2还连接到RS232C,通过电平转换实现TTL电平和RS232电平的兼容。
8. **CAN接口**:由CAN_RX、CAN_TX组成,用于实现控制器局域网络通信,适用于汽车电子和工业自动化等场合。
9. **I2C接口**:包括I2C1_SDA和I2C1_SCL,用于控制和支持I2C总线上的设备。
10. **按键与LED**:电路中有多个独立的按键(key1、key2)和LED(LED1、LED3、LED3、LED6、LED8),这些通常是用户交互的输入输出接口。
11. **电源调节**:U9和U10是LM2596电源调整器,用于将输入电压转换为稳定的5V和12V,以供应不同模块的电源需求。
12. **SPI接口**:通过SP3232EEN-L/TR实现,用于高速串行通信。
13. **485接口**:U4是485收发器,用于RS-485通信,具有远距离传输能力。
14. **传感器接口**:存在用于连接MPU9250等传感器的接口,如Header-MPU9250。
15. **其他接口**:如DB128连接器,可能是用于扩展或连接其他硬件的接口。
整体来看,这个控制器设计考虑了多种通信方式,可以支持实时音视频处理,同时也具备丰富的输入输出接口,便于与其他设备进行交互和扩展。
1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
VBAT
1
PC13-TAMPER-RTC
2
PC14-OSC32_IN
3
PC15-OSC32_OUT
4
PD0-OSC_IN
5
PD1-OSC_OUT
6
NRST
7
VSSA
8
VDDA
9
PA0-WKUP
10
PA1
11
PA2
12
PA3
13
PA4
14
PA5
15
PA6
16
PA7
17
PB0
18
PB1
19
PB2
20
PB10
21
PB11
22
VSS_1
23
VDD_1
24
PB12
25
PB13
26
PB14
27
PB15
28
PA8
29
PA9
30
PA10
31
PA11
32
PA12
33
PA13
34
VSS_2
35
VDD_2
36
PA14
37
PA15
38
PB3
39
PB4
40
PB5
41
PB6
42
PB7
43
BOOT0
44
PB8
45
PB9
46
VSS_3
47
VDD_3
48
U1
STM32F103C8T6
X2 32.768KHz
C1 15pF
C2 15pF
C3 22pF
C4 22pF
R1
1M
osc32_in
osc32_out
osc8_in
osc8_out
GND
GND
osc8_out
osc8_in
osc32_in
osc32_out
时钟电路
boot0
NRST
复位与BOOT
R2
10K
GND
GND
boot0
+3V3
R3
10K
C5
100nF
SWDIO
SWCLK
+3V3
SWDIO
SWCLK
GND
SWD程序下载
单片机供电
vbat
vssa
vdda
vss1
vdd1
vdd2
vdd3
vss2
vss3
vbat
vdda
vdd1
vdd2
vdd3
vssa
vss1
vss2
vss3
GND
GND
+3V3
R5
0
R4
0
电源LED与功能按键
+3V3
R6
1K
R7
1K
GND
LED3
LED3
uart1_rx
uart2_rx
uart2_tx
uart3_tx
uart3_rx
RS232
C1+
1
V+
2
C1-
3
C2+
4
C2-
5
V-
6
T2OUT
7
R2IN
8
R2OUT
9
T2IN
10
T1IN
11
R1OUT
12
R1IN
13
T1OUT
14
GND
15
VCC
16
U2
SP3232EEN-L/TR
uart2_tx
uart2_rx
T1OUT T1OUT
R1IN
R1IN
+3V3
GND
GND
GND
RO
1
RE#
2
DE
3
DI
4
GND
5
A
6
B
7
VCC
8
U3
SP3485EN-L/TR
RS485
1
1
2
2
U4
KF128L-3.5-2P
uart3_rx uart3_tx
GND
+3V3
GND
NC
1
A
2
GND
3
Y
4
VCC
5
U5
SN74LVC1G14DBVR_C434069
C12
100nF
GND
+3V3
反相器
1
1
2
2
U8
KF128L-3.5-2P
can_rx
can_tx
CAN接口
can_tx
can_rx
I2C1_SCL
I2C1_SDA
IIC接口
C14
100nF
R8
10K
+3V3
GND
NRST
key1 key2
GND
+3V3
R9
10K
C15
100nF
key1
key2
C16
100nF
C17
100nF
C18
100nF
GND
C19
100nF
C20
100nF
GND
GND
VIN
1
OUTPUT
2
GND
3
FB
4
ON#/ OFF
5
GND
6
U9
LM2596R-ADJ
24V-5V*2A
VOUT_5V GND
VOUT_5V
VIN
GND
GND
R12
390
L3
68uH 3A
R11
1.2K
GND
C27_CFF
3.3nF
D3
SS34
D2
SS34
GND
L2
68uH 3A
GND
GND
VIN
GNDVOUT_12V
24V-12V*3A
VIN
1
OUTPUT
2
GND
3
FB
4
ON#/ OFF
5
GND
6
U10
LM2596R-ADJ
GND
R14
560
R13
4.7K
C331nF
+3V3
GND
I2C1_SCL
I2C1_SDA
uart1_rx
rx_input
rx_input
GND
+5VVOUT_5V
GND/ADJ
1
Vout
2
Vin
3
Vout
4
U13
AMS1117-3.3
+5V
+3V3
GND
C13
100nF
C40
1uF
GND
C22
1uF
C23
10nF
C24
1uF
C25
10nF
C29
1uF
C30
10nF
C31
1uF
C32
10nF
LED1
KT-0603R
LED4
KT-0603G
LED8
KT-0603G
LED6
KT-0603G
LED5
KT-0603G
GND
R15
5.1K
R17
5.1K
R19
5.1K
VOUT_5V
VOUT_12V
VIN
vout12v
vout5v
1
1
2
2
U12
DB128V-7.5-2P
1
1
2
2
U15
DB128V-7.5-2P
1
1
2
2
U16
DB128V-7.5-2P
485A
485B
C47
220uF
C46
220uF
1
1
2
2
3
3
4
4
SWD 2.54-4P
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
H2
Header-MPU9250
1
1
2
2
3
3
H3
Header-3P-DBUS
C27
100nF
C7
100nF
C8
100nF
C6
100nF
C9
100nF
C10
100nF
1
2
3
4
5
6
7
8
9
0
0
Header-232
Header-232
R21
0
X3
8MHz
3 4
1 2
KEY1
TS-1109S-B-B
3 4
1 2
KEY2
TS-1109S-B-B
3 4
1 2
RESET
TS-1109S-B-B
C26
220uF
C21
220uF
GND
R22
1K
R23
1K
LED2
LED2
LED2
KT-0603R
LED3
KT-0603R
LED1
LED1
VOUT_12V
通讯接口按键与LED
STM32最小系统 对外供电电源
1
2
3
4 5
6
7
8
S1
SW-DIP4
1 2
3 4
5 6
P1
Header 3X2
GND
R10
10K
R16
10K
R18
10K
R24
10K
+3V3
跳线帽上接485输出,下接UART3输出
2.54输出接口
TXD
1
GND
2
Vcc
3
RXD
4
Vref
5
CANL
6
CANH
7
Rs
8
U19
TJA1050
R50
120R
R49
10K
GND
GND
C11
100nF
R51
4.7K
R52
470R
CAN通信芯片
1
2
3
4
P?
Header 4
PB8
PB9
PB0
PB1
PB2
PB3
PB5
PA15
PA0
PA1
PA4
PA8
PA9
PB12
PB13
PB15
RX TX
RX
TX
GND
PA15
PB3
PB4
PB5
PB4
PB14
1
2
3
P3
Header 3
+5V
+5V
+5V
+5V
四路编码输出
Mick 机器人控制板 V1.1.1
适用用于MickX4 MickM4两款开源底盘
代码地址:https://github.com/RuPingCen/mick_robot_chasiss
电源指示灯
R57
10K
R58
10K
+3V3
GND
R56
10K
+3V3
R55
10K
R54
1K
GND
+3V3
R53
10K
R59
120
1
2 3
Q5
S8050-J3Y
PIC101
PIC102
COC1
PIC201
PIC202
COC2
PIC301
PIC302
COC3
PIC401
PIC402
COC4
PIC501
PIC502
COC5
PIC601
PIC602
COC6
PIC701
PIC702
COC7
PIC801
PIC802
COC8
PIC901
PIC902
COC9
PIC1001
PIC1002
COC10
PIC1101
PIC1102
COC11
PIC1201
PIC1202
COC12
PIC1301
PIC1302
COC13
PIC1401
PIC1402
COC14
PIC1501
PIC1502
COC15
PIC1601
PIC1602
COC16
PIC1701
PIC1702
COC17
PIC1801
PIC1802
COC18
PIC1901
PIC1902
COC19
PIC2001
PIC2002
COC20
PIC2101
PIC2102
COC21
PIC2201
PIC2202
COC22
PIC2301
PIC2302
COC23
PIC2401
PIC2402
COC24
PIC2501
PIC2502
COC25
PIC2601
PIC2602
COC26
PIC2701
PIC2702
COC27
PIC270CFF01
PIC270CFF02
COC270CFF
PIC2901
PIC2902
COC29
PIC3001
PIC3002
COC30
PIC3101
PIC3102
COC31
PIC3201
PIC3202
COC32
PIC3301
PIC3302
COC33
PIC4001
PIC4002
COC40
PIC4601
PIC4602
COC46
PIC4701
PIC4702
COC47
PID201
PID202
COD2
PID301
PID302
COD3
PIH201
PIH202
PIH203
PIH204
PIH205
PIH206
PIH207
PIH208
PIH209
PIH2010
COH2
PIH301
PIH302
PIH303
COH3
PIHeader023200
PIHeader023201
PIHeader023202
PIHeader023203
PIHeader023204
PIHeader023205
PIHeader023206
PIHeader023207
PIHeader023208
PIHeader023209
COHeader0232
PIKEY101
PIKEY102
PIKEY103
PIKEY104
COKEY1
PIKEY201
PIKEY202
PIKEY203
PIKEY204
COKEY2
PIL201
PIL202
COL2
PIL301
PIL302
COL3
PILED101
PILED102
COLED1
PILED201
PILED202
COLED2
PILED301
PILED302
COLED3
PILED401
PILED402
COLED4
PILED501
PILED502
COLED5
PILED601
PILED602
COLED6
PILED801
PILED802
COLED8
PIP101
PIP102
PIP103
PIP104
PIP105
PIP106
COP1
PIP301
PIP302
PIP303
COP3
PIP?01
PIP?02
PIP?03
PIP?04
COP?
PIQ501
PIQ502
PIQ503
COQ5
PIR101
PIR102
COR1
PIR201
PIR202
COR2
PIR301
PIR302
COR3
PIR401
PIR402
COR4
PIR501
PIR502
COR5
PIR601
PIR602
COR6
PIR701
PIR702
COR7
PIR801
PIR802
COR8
PIR901
PIR902
COR9
PIR1001
PIR1002
COR10
PIR1101
PIR1102
COR11
PIR1201
PIR1202
COR12
PIR1301
PIR1302
COR13
PIR1401
PIR1402
COR14
PIR1501
PIR1502
COR15
PIR1601
PIR1602
COR16
PIR1701
PIR1702
COR17
PIR1801
PIR1802
COR18
PIR1901
PIR1902
COR19
PIR2101
PIR2102
COR21
PIR2201
PIR2202
COR22
PIR2301
PIR2302
COR23
PIR2401
PIR2402
COR24
PIR4901
PIR4902
COR49
PIR5001
PIR5002
COR50
PIR5101
PIR5102
COR51
PIR5201
PIR5202
COR52
PIR5301
PIR5302
COR53
PIR5401
PIR5402
COR54
PIR5501
PIR5502
COR55
PIR5601
PIR5602
COR56
PIR5701
PIR5702
COR57
PIR5801
PIR5802
COR58
PIR5901
PIR5902
COR59
PIRESET01
PIRESET02
PIRESET03
PIRESET04
CORESET
PIS101
PIS102
PIS103
PIS104
PIS105
PIS106
PIS107
PIS108
COS1
PISWD01
PISWD02
PISWD03
PISWD04
COSWD
PIU101
PIU102
PIU103
PIU104
PIU105
PIU106
PIU107
PIU108
PIU109
PIU1010
PIU1011
PIU1012
PIU1013
PIU1014
PIU1015
PIU1016
PIU1017
PIU1018
PIU1019
PIU1020
PIU1021
PIU1022
PIU1023
PIU1024
PIU1025
PIU1026
PIU1027
PIU1028
PIU1029
PIU1030
PIU1031
PIU1032
PIU1033
PIU1034
PIU1035
PIU1036
PIU1037
PIU1038
PIU1039
PIU1040
PIU1041
PIU1042
PIU1043
PIU1044
PIU1045
PIU1046
PIU1047
PIU1048
COU1
PIU201
PIU202
PIU203
PIU204
PIU205
PIU206
PIU207
PIU208
PIU209
PIU2010
PIU2011
PIU2012
PIU2013
PIU2014
PIU2015
PIU2016
COU2
PIU301
PIU302
PIU303
PIU304
PIU305
PIU306
PIU307
PIU308
COU3
PIU401
PIU402
COU4
PIU501
PIU502
PIU503
PIU504
PIU505
COU5
PIU801
PIU802
COU8
PIU901
PIU902
PIU903
PIU904
PIU905
PIU906
COU9
PIU1001
PIU1002
PIU1003
PIU1004
PIU1005
PIU1006
COU10
PIU1201
PIU1202
COU12
PIU1301
PIU1302
PIU1303
PIU1304
COU13
PIU1501
PIU1502
COU15
PIU1601
PIU1602
COU16
PIU1901
PIU1902
PIU1903
PIU1904
PIU1905
PIU1906
PIU1907
PIU1908
COU19
PIX201
PIX202
COX2
PIX301
PIX302
COX3
PIC901
PIC1001
PIC1202
PIC1302
PIC1602
PIC1702
PIC1802
PIC1902
PIC2002
PIH201
PILED101
PILED201
PILED301
PILED401
PIR301
PIR402
PIR502
PIR801
PIR901
PIR1002
PIR1602
PIR1802
PIR2402
PIR5301
PIR5501
PIR5601
PIR5802
PISWD04
PIU1024
PIU1036
PIU1048
PIU2016
PIU308
PIU505
PIU1304
NL03V3
NLvdd1
NLvdd2
NLvdd3
PIC1101
PIC4002
PIH302
PIP?01
PIR2102
PIR5101
PIU1303
PIU1903
NL05V
PIR5702
PIR5901
PIU307
PIU401
NL485A
PIR5801
PIR5902
PIU306
PIU402
NL485B
PIR201
PIU1044
NLboot0
PIR5201
PIU1032
NLcan0rx
PIR5102
PIU1033
PIU1901
NLcan0tx
PIC101
PIC201
PIC301
PIC401
PIC501
PIC801
PIC902
PIC1002
PIC1102
PIC1201
PIC1301
PIC1401
PIC1501
PIC1601
PIC1701
PIC1801
PIC1901
PIC2001
PIC2102
PIC2201
PIC2301
PIC2401
PIC2501
PIC2602
PIC2701
PIC2901
PIC3001
PIC3101
PIC3201
PIC4001
PIC4602
PIC4702
PID202
PID302
PIH202
PIH303
PIHeader023205
PIKEY102
PIKEY202
PILED502
PILED602
PILED802
PIP?04
PIQ502
PIR202
PIR702
PIR1202
PIR1402
PIR4901
PIR5701
PIRESET02
PIS101
PIS102
PIS103
PIS104
PISWD01
PIU108
PIU1023
PIU1035
PIU1047
PIU2015
PIU304
PIU305
PIU503
PIU903
PIU905
PIU906
PIU1003
PIU1005
PIU1006
PIU1201
PIU1301
PIU1501
PIU1601
PIU1902
NLGND
NLvss1
NLvss2
NLvss3
NLvssa
PIH203
PIU1042
NLI2C10SCL
PIH204
PIU1043
NLI2C10SDA
PIC1402
PIKEY104
PIR802
PIU1017
NLkey1
PIC1502
PIKEY204
PIR902
PIU1020
NLkey2
NLPB2
PIR602
PIU1016
NLLED1
PIR2202
PIU1015
NLLED2
PIR2302
PIU102
NLLED3
PIC601
PIU203
PIC602
PIU201
PIC701
PIU205
PIC702
PIU204
PIC802
PIU202
PIC2702
PIU206
PIC270CFF01
PIR1101
PIR1201
PIU904
PIC3301
PIR1301
PIR1401
PIU1004
PIH205
PIH206
PIH207
PIH208
PIH209
PIH2010
PIHeader023200
PIHeader023201
PIHeader023204
PIHeader023206
PIHeader023207
PIHeader023208
PIHeader023209
PIKEY101
PIKEY103
PIKEY201
PIKEY203
PILED102
PIR601
PILED202
PIR2201
PILED302
PIR2301
PILED402
PIR701
PILED501
PIR1702
PILED601
PIR1502
PILED801
PIR1902
PIP101
PIR5602
PIU301
PIP102
PIR5302
PIR5401
PIP303
PIU1202
PIQ501
PIR5402
PIQ503
PIR5502
PIU302
PIU303
PIR4902
PIU1908
PIR5001
PIU801
PIU1907
PIR5002
PIU802
PIU1906
PIR5202
PIU1904
PIRESET01
PIRESET03
PIU207
PIU208
PIU209
PIU2010
PIU501
PIU1302
PIU1905
PIC502
PIR302
PIRESET04
PIU107
NLNRST
PIC302
PIR102
PIU105
PIX301
NLosc80in
PIC402
PIR101
PIU106
PIX302
NLosc80out
PIC102
PIU103
PIX202
NLosc320in
PIC202
PIU104
PIX201
NLosc320out
PIU1010
NLPA0
PIU1011
NLPA1
PIU1014
NLPA4
PIU1029
NLPA8
PIU1030
NLPA9
PIR2401
PIS105
PIU1038
NLPA15
PIU1018
NLPB0
PIU1019
NLPB1
PIR1801
PIS106
PIU1039
NLPB3
PIR1601
PIS107
PIU1040
NLPB4
PIR1001
PIS108
PIU1041
NLPB5
PIU1045
NLPB8
PIU1046
NLPB9
PIU1025
NLPB12
PIU1026
NLPB13
PIU1027
NLPB14
PIU1028
NLPB15
PIHeader023203
PIU2013
NLR1IN
PIP105
PIP?02
NLRX
PIH301
PIU502
NLrx0input
PISWD02
PIU1037
NLSWCLK
PISWD03
PIU1034
NLSWDIO
PIHeader023202
PIU2014
NLT1OUT
PIP106
PIP?03
NLTX
PIU1031
PIU504
NLuart10rx
PIU1013
PIU2012
NLuart20rx
PIU1012
PIU2011
NLuart20tx
PIP103
PIU1022
NLuart30rx
PIP104
PIU1021
NLuart30tx
PIR501
PIU101
NLvbat
PIR401
PIU109
NLvdda
PIC2101
PIC2402
PIC2502
PIC2601
PIC3102
PIC3202
PIP301
PIP302
PIR1901
PIU901
PIU1001
NLVIN
PID301
PIL301
PIU902
NLvout5v
PID201
PIL201
PIU1002
NLvout12v
PIC2202
PIC2302
PIC270CFF02
PIC4701
PIL302
PIR1102
PIR1701
PIR2101
PIU1502
NLVOUT05V
PIC2902
PIC3002
PIC3302
PIC4601
PIL202
PIR1302
PIR1501
PIU1602
NLVOUT012V
下载后可阅读完整内容,剩余2页未读,立即下载
182 浏览量
2021-01-24 上传
109 浏览量
2020-06-03 上传
104 浏览量
153 浏览量
2022-02-16 上传
2022-01-20 上传
137 浏览量
2022-02-25 上传
105 浏览量
2023-07-27 上传
152 浏览量
161 浏览量
资源评论


仙夜子
- 粉丝: 45
- 资源: 325









最新资源
- 欧洲地下埋地周界检测系统市场调研:2023年欧洲市场的价值为3.755亿欧元.pdf
- 欧洲电动填缝工具行业分析:2023年,欧洲市场的价值为3.165亿欧元.pdf
- 人人都能学的数据分析(16周完整版+源码+PDF课件)
- 氢气管束容器市场研究:预计到2030年欧洲市场将达到3.135亿.pdf
- 全球镀铜电解液和添加剂市场深度分析与未来趋势预测.pdf
- 全球辅助生殖器械行业深度剖析与未来发展趋势预测.pdf
- 全球辐射管行业深度分析与未来投资前景展望.pdf
- 开发全文检索接口用到的SDK
- 薰衣草产品市场分析:预计2030年全球市场销售额将达到8.28亿美元.pdf
- 全球重组白蛋白行业深度分析及未来趋势预测.pdf
- 医美面膜市场格局:预计2030年全球市场销售额将达到2.97亿美元.pdf
- 预染彩色蛋白质标记物市场研究:2024年欧洲市场的价值达到1.656亿欧元.pdf
- 证件阅读器市场分析:预计2030年全球市场销售额达到3.84亿美元.pdf
- 自动驾驶汽车市场分析:预计2030年全球市场销售额将达到2196.2亿美元.pdf
- 注射溶脂市场分析:预计2030年全球市场销售额将达到6.85亿美元.pdf
- 国产数据库产品概览:名录与分类汇总推动信息化自主可控
