MIT6.837作业实验报告1
需积分: 0 131 浏览量
2022-08-08
23:15:57
上传
评论
收藏 1.65MB DOCX 举报


MIT 6.837 作业实验报告
1. 实验内容概述
1.1 分形(预备作业)
这是一个预备作业,不涉及到课程的核心内容。作业的具体内容是利用 IFS(Iterated
Function System)画一些自相似的分形的图形。
1.2 光线追踪(Assignment 1~7,核心内容)
光线追踪算法的实现和优化是整个课程的核心内容。其基础包括根据相机投射射线,射
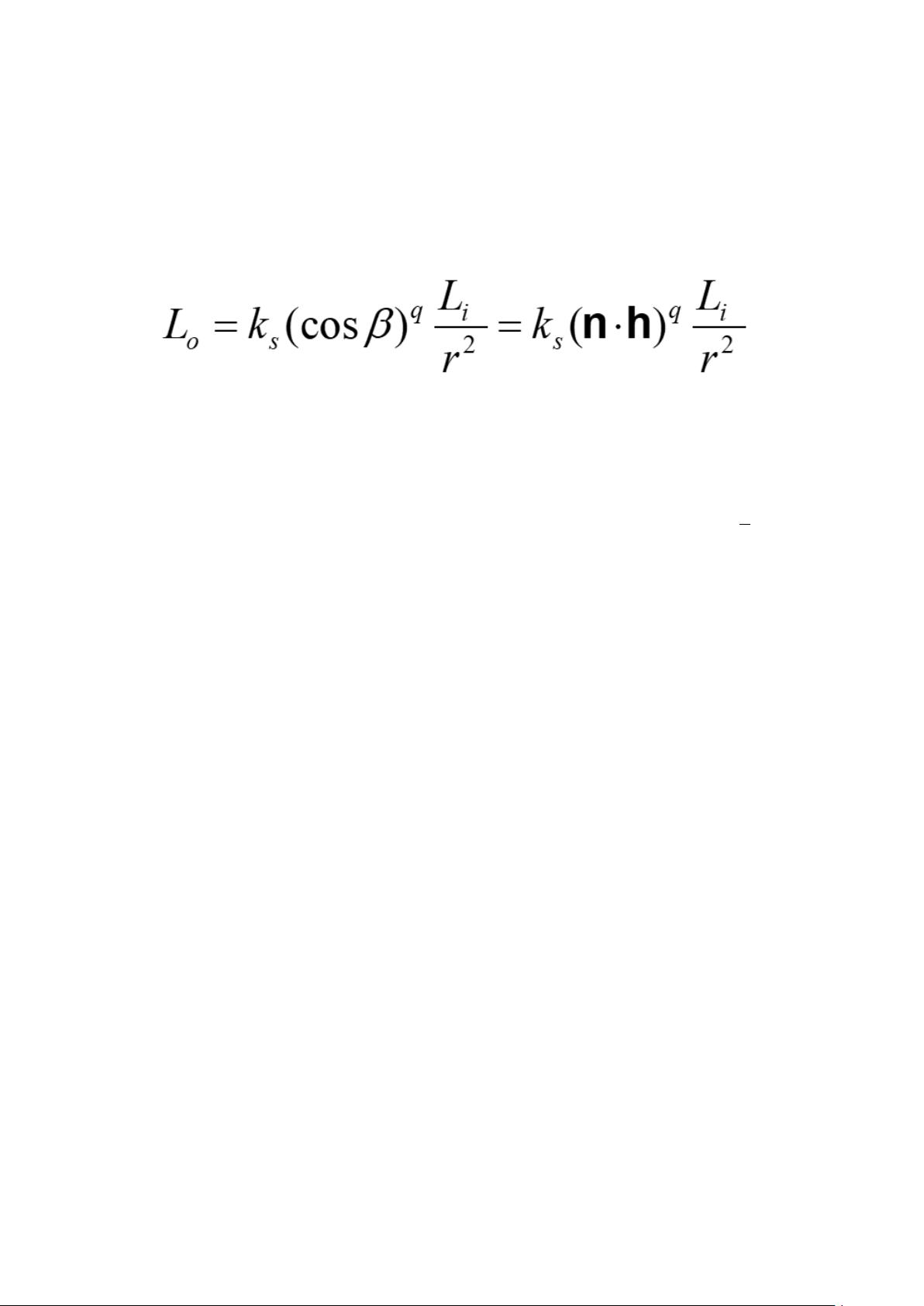
线与空间物体求交,交点处利用 Phong shading 光照模型计算光照以及计算阴影。这样实现
的光线追踪不能模拟自然中光线的反射和折射,不能实现镜面或者透明的物体的效果,为解
决这一问题,改进了算法采用递归的方法,射线与物体求交后,该交点处的颜色由三部分组
成,第一部分是自身用光照模型着色的颜色,第二部分是反射光线的颜色(结果需要乘反射
的系数),第三部分是折射光线的颜色(需要乘折射的系数),这三部分组合起来才构成一个
交点的颜色。后两部分需要继续进行光线追踪,因此是一个递归的调用。
第二个改进是速度的改进。由于场景中很可能有大量三角形面片,如果每一次都全部求
交将涉及大量运算,而这些运算有很大一部分是不需要的。作业中涉及了一种优化方法,将
空间划分成均匀大小的立方体(三维网格),然后将物体放入与之相交的格子中,这样,与
一条射线有交点的物体必须存在于他经过的格子中,于是只需要对路径上的格子中的物体求
交。
除了上述改进,另外一个优化不仅仅属于光线追踪,而是对信号采样都有效的优化——
反走样。光线追踪得到的是一个二维的连续函数,这个函数根据光线追踪算法来定义,并且
作为光线追踪算法的结果其实是已经完成了光线追踪的工作了,剩下的就是将这个函数显示
出来,这就必须涉及到采样,于是立刻就有走样的问题,需要进行反走样。
1.3 OpenGL 的使用和 rendering pipeline(Assignment 3)
OpenGL 是一套图形 API,在作业中使用 OpenGL 的方式类似于传递命令,一部分函数用
来设置状态,一部分函数用于传输数据,例如顶点坐标。使用的模式一般就是,打开(或关
闭)某些开关,设置参数,传输数据。这一部分了解还比较浅,作业中也一般以基础代码的
形式提供,需要下个作业的时候更加深入学习。
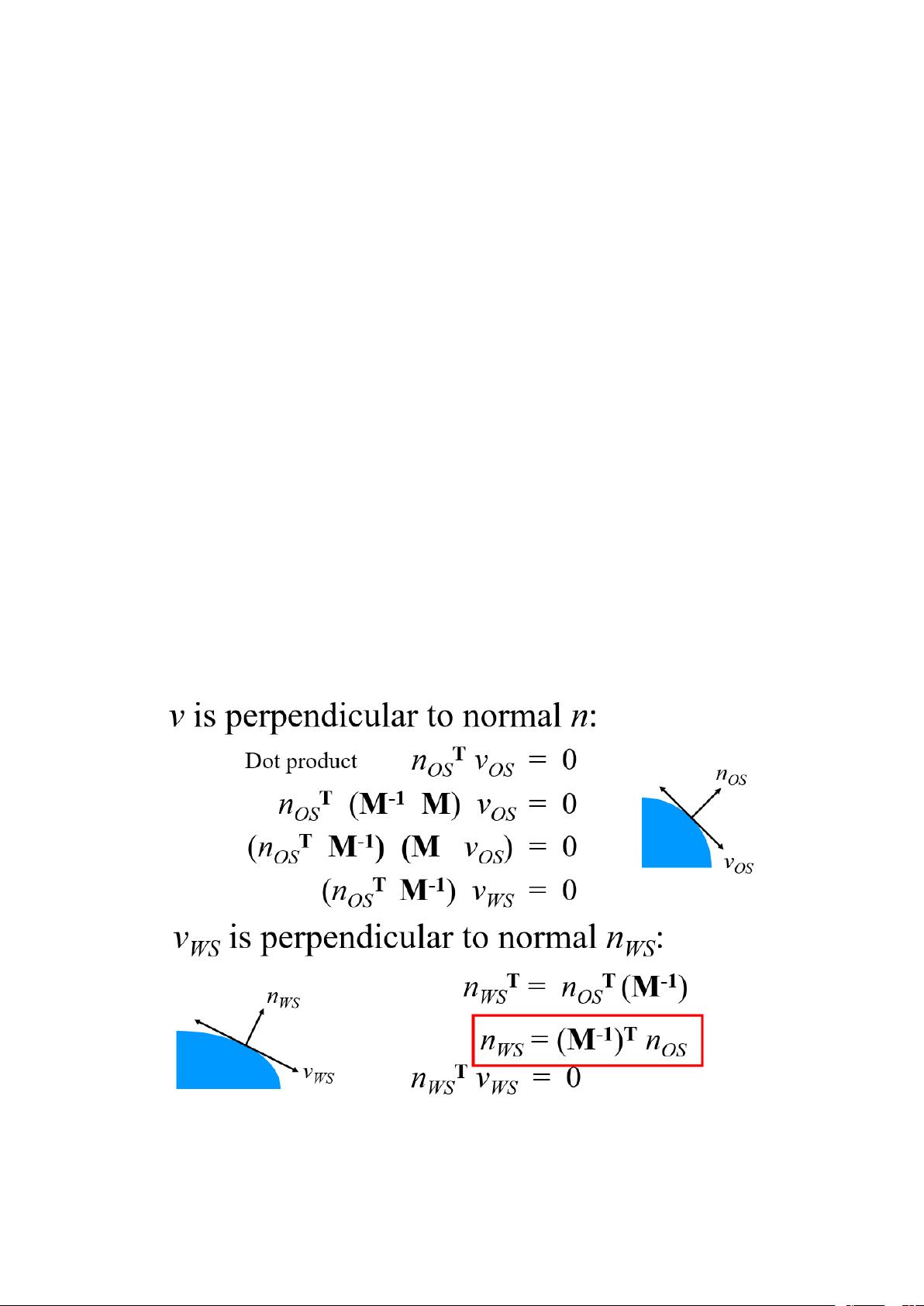
渲染管线是对场景中每一个对象做变换得到屏幕空间中的对象,同时能够计算顶点的属
性值并对三角形面片进行插值计算像素。
1.4 曲线和曲面(Assignment 8)
作业中主要使用到两种曲线:Bezier 曲线和 B-spline 曲线。这两种曲线性质有一些不
同,作业中主要讨论的是两种曲线的 3 次的版本。三次 Bezier 曲线有 4 个控制点,如果需
要更多的控制,需要一段一段地拼接多条 Bezier 曲线,每两段曲线之间只共享一个点。而
且多端拼接的 Bezier 曲线只能保证 C0,如果在拼接处让控制点中心对称,可以保证 C1 连
续性,但是 C2 以及更高的连续性不能保证;B-spline 曲线也是 piece-wise 多段曲线拼接
成的,每一段有 4 个控制点,但是相邻两段曲线共享 3 个控制点,增加控制点和删除控制点
都非常方便,而且 B-spline 曲线可以保证更好的连续性。

剩余16页未读,继续阅读













评论0