中文文档1
需积分: 0 168 浏览量
2022-08-08
20:37:26
上传
评论
收藏 640KB DOCX 举报


1 引言
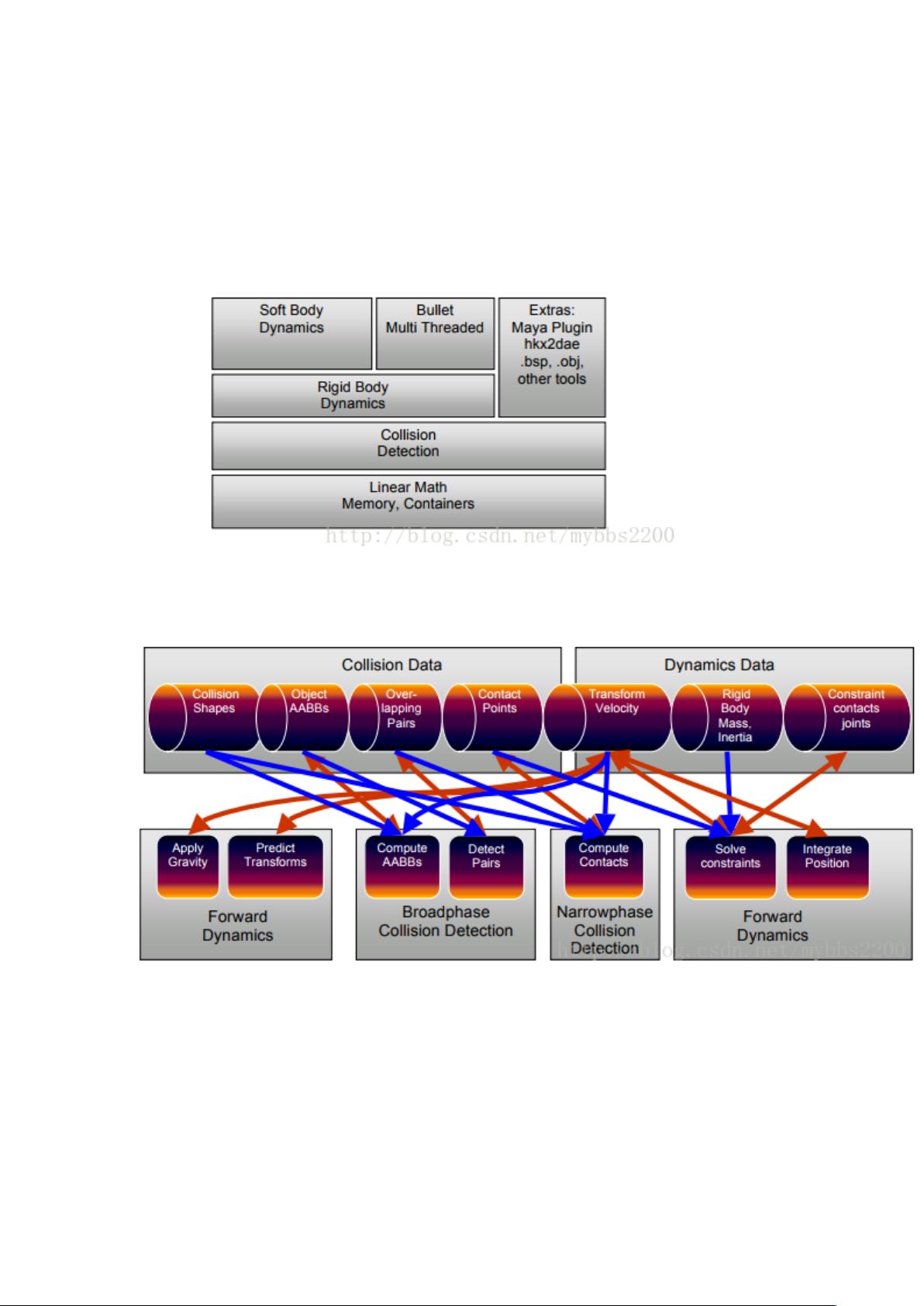
Library 描述
bulletphysics 是一种专业的使用便携式 C ++编写的开源 collisiondetection,
rigidbody 和软体动力学库。 bulletphysics Library 主要设计用于游戏,视觉
效果和机器人模拟。 Library 根据 ZLib 许可证免费商业使用。
主要特点
� 离散和连续的 collisiondetection,包括射线和凸起扫描测试。 碰撞形
状包括凹凸网格和所有的基本图元
� 最 大 坐 标 6 自 由 度 rigid body ( btRigidBody ) 连 接 constraints
(btTypedConstraint)以及广义坐标多体 (btMultiBody)使用由动力装
置连接的关节运动算法。
� 快速稳定的 Rigid BodyDynamicsconstraints 求解器,车辆动力学特征控
制器和滑块,铰链,通用 6DOF 和锥形扭转 constraints
� 软体动力学用于布,绳和可变形体积与双向相互作用 rigid body,包括
constraints 支持
� 在 Zlib 许可证下开源 C ++代码,并在所有平台上免费使用任何商业用途
包括 PLAYSTATION3,XBox
360,Wii,PC,Linux,Mac OSX,Android 和 iPhone
� Maya Dynamica 插件,Blender 集成,本机二进制串行化 示例如何导入
URDF,Wavefront.obj 和 Quake .bsp 文件。
� 许多示例说明如何使用 SDK。 所有的 example 很容易浏览 OpenGL 3 示例
浏览器。 每个示例也可以编译没有图形。
� 快速启动指南,Doxygen 文档,维基和论坛补充了示例。联系和支持
� 支持和反馈公共论坛,请 http://bulletphysics.org
2 编译系统,入门和新增功能
请参阅单独的 BulletQuickstart.pdf 指南。
从 bullet2.83 起,有一个单独的快速入门指南。 这个快速入门指南包括


剩余33页未读,继续阅读













评论0