实验8-实验指导书1
需积分: 0 32 浏览量
2022-08-04
13:31:22
上传
评论
收藏 834KB PDF 举报


1
实验八 无人机 SLAM 基础 – 立体环境建模与路径规划
1.1 实验目的
在无人机的各种应用中,测绘作为一种重要功能,已经在近年来得到广大研
究者关注。激光雷达作为获取目标散射点三维信息的工具,是无人机在测绘领域
应用的重要传感器。
本次实验的目的是在 PCL 库的基础上掌握 C++的基本编程,以及基本点云
分析、地图构建方法的实现。在前序 PCL 库配置实验的基础上,充分利用 PCL
库以及 Visual Studio 强大的功能对现有的点云数据进行环境建模分析,并利用建
模的环境信息进行简单的路径规划。实现基本的障碍物规避,路径优化以及算法
比较等任务。了解基本的图论算法在路径规划中的应用,并使用 C++和 PCL 库
对算法进行实现。
1.2 实验原理
1.2.1 激光雷达探测原理
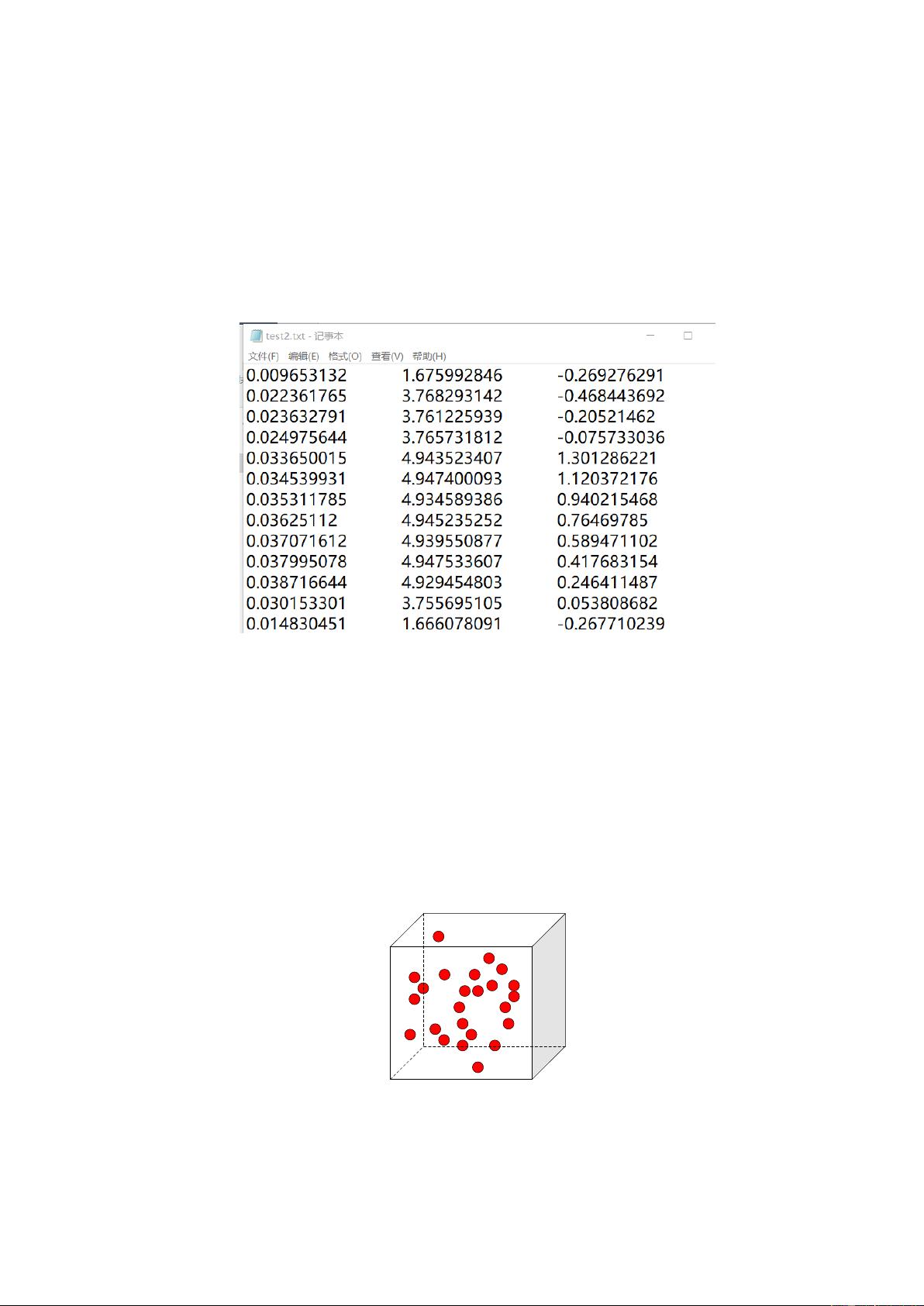
本次实验的主要任务是利用激光雷达获取的环境信息,根据环境中的散射点
分布,建立合适的模型以表示障碍物和自由空间的相对位置关系。并在此基础上,
给定起始点和终点,设计路径搜索算法实现室内场景下无人机的航迹规划。
激光雷达作为获取环境信息的重要传感器,其成像是对于环境场景进行三维
模型建立的最直接的方式。激光雷达的成像原理与雷达类似,它利用光的传播特
性,发射激光脉冲并统计回波的峰值时刻,通过其与波长的比对,从而获取目标
的距离信息。

剩余10页未读,继续阅读

华亿
- 粉丝: 44
- 资源: 308









最新资源
- python-leetcode面试题解之第421题数组中两个数的最大异或值.zip
- python-leetcode面试题解之第416题分割等和子集.zip
- python-leetcode面试题解之第414题第三大的数.zip
- python-leetcode面试题解之第412题Fizz-Buzz.zip
- python-leetcode面试题解之第409题最长回文串.zip
- python-leetcode面试题解之第408题有效单词缩写.zip
- python-leetcode面试题解之第405题数字转换为十六进制数.zip
- python-leetcode面试题解之第404题左叶子之和.zip
- python-leetcode面试题解之第401题二进制手表.zip
- python-leetcode面试题解之第400题第N位数字.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0