从图像到点云python版1
需积分: 0 131 浏览量
2022-08-04
16:59:45
上传
评论 1
收藏 2.48MB PDF 举报

用 python 学习 rgbd-slam
最近开始学习 ros,然后搜索 slam 教程,看到高翔大神写的《一起做 rgbd-slam》系列,
很有启发,也很佩服,但是高翔大神用的都是 c++,本人比较喜欢 python,所以想把文章中
的代码改成 python 版本,也好记录一下自己的学习心得。
原文链接:
高博博客:
http://www.cnblogs.com/gaoxiang12/tag/%E4%B8%80%E8%B5%B7%E5%81%9ARGB-
D%20SLAM/
ROSClub 链接: http://rosclub.cn/portal.php?mod=list&catid=9&page=7
时间规划:
《一起做 rgbd-slam》高博原文一共 9 篇,加上我个人水平有限,数学也不高,所以前
期先做原文代码验证及其自己补充学习,有些可能写的不对,这个也在所难免,所以预计时
间为一个月,大概从 2017 年 2 月 10 日-2017 年 3 月 30 日,这里先立一个 flag,万一呢。
永久更新链接:
ROSClub:http://www.rosclub.cn
相关代码及数据:https://github.com/zsirui/slam-python.git
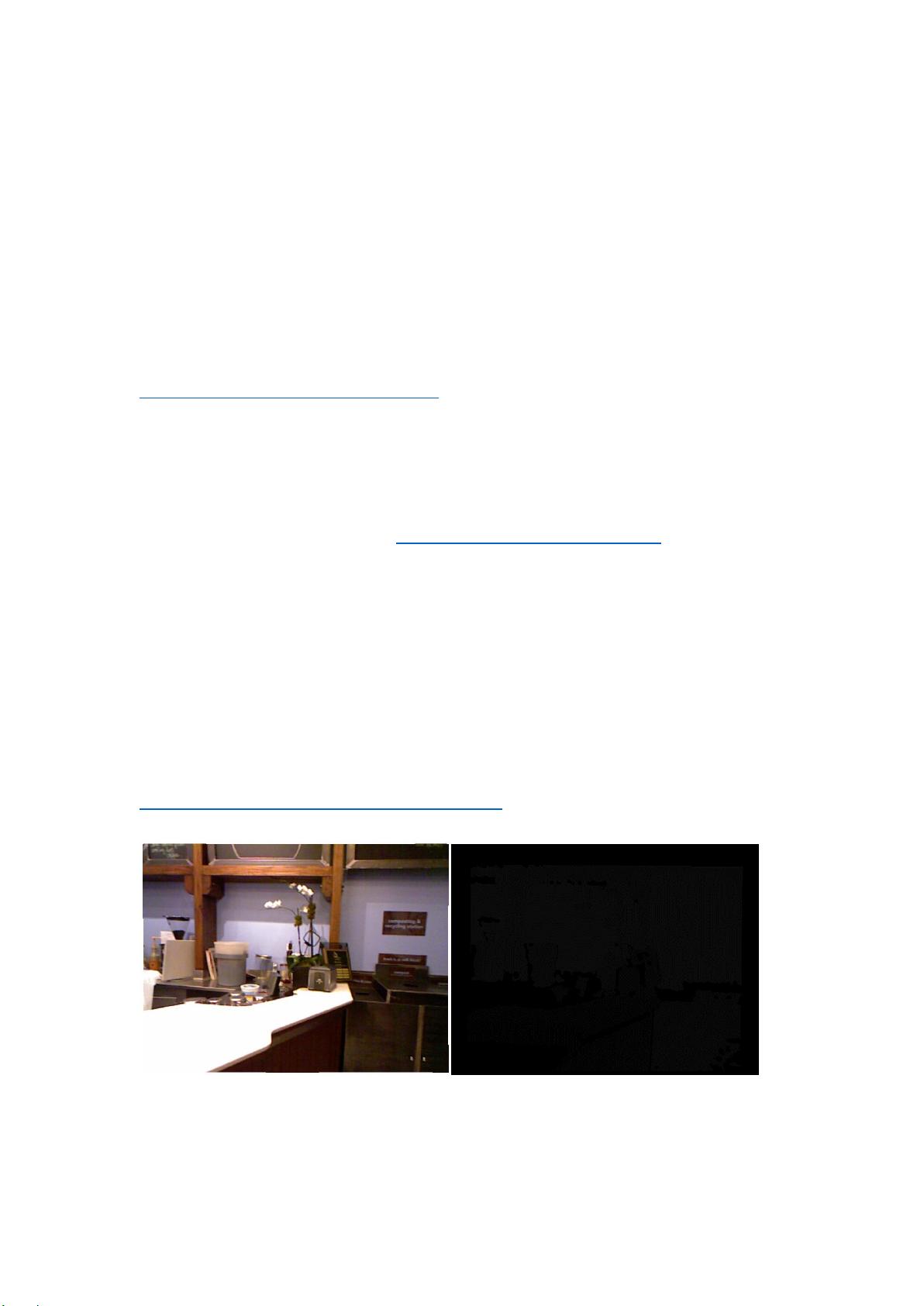
第一篇:从图像到点云(Python 版)
原文链接:
http://www.cnblogs.com/gaoxiang12/p/4652478.html
http://rosclub.cn/post-75.html
0x00 准备
软件:ubuntu14.04、ros-indigo-desktop-full、python2.7、pip 等
硬件:asus xtion pro、电脑
依赖库:OpenCV(强烈建议使用 3.0 以上版本,本教程所有代码使用的是 OpenCV3.2.0 版)、
Numpy、PCL
依赖库安装:
pip:sudo apt-get install python-pip
OpenCV:
(1)如果安装了 ros,用自带的就可以
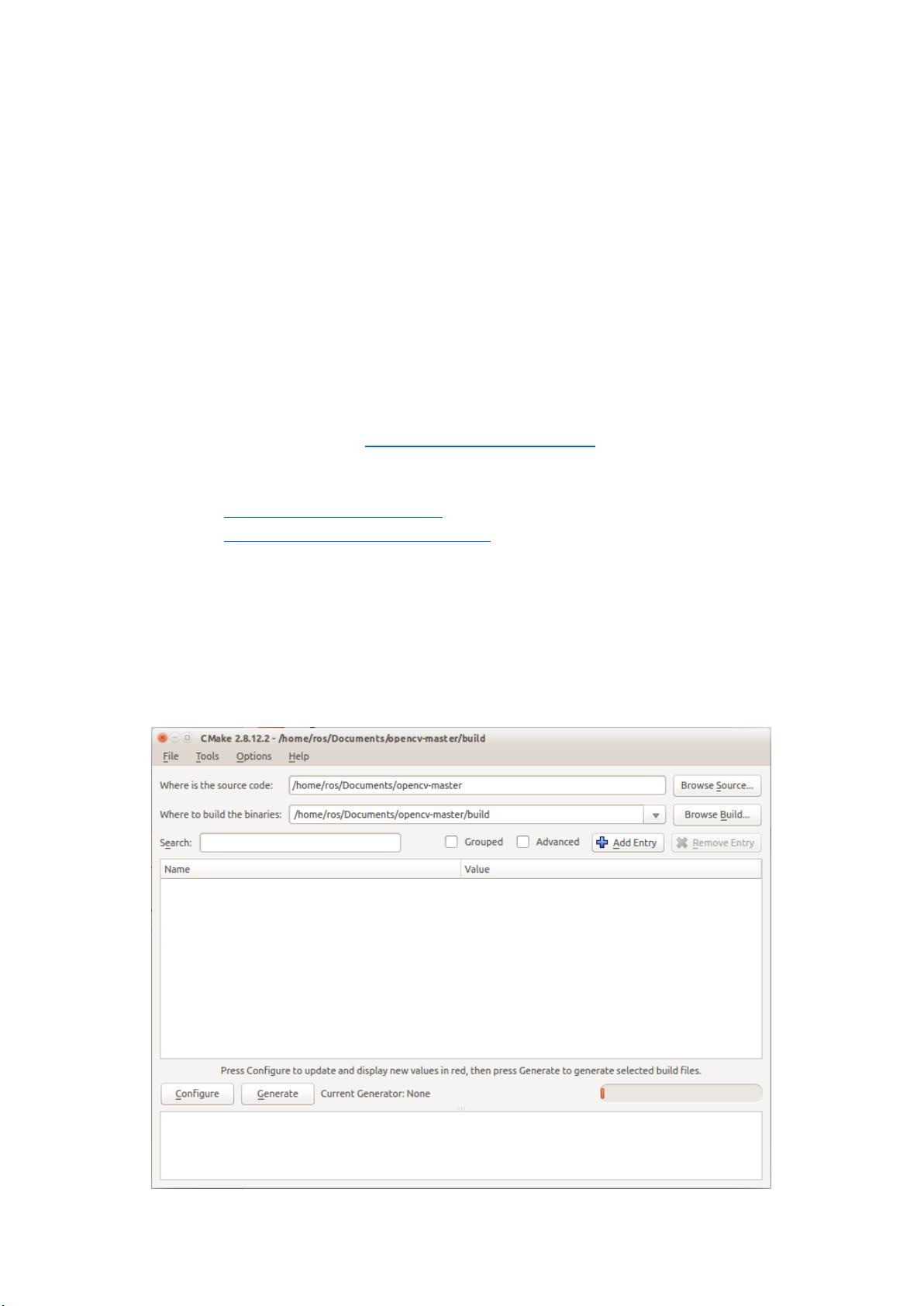
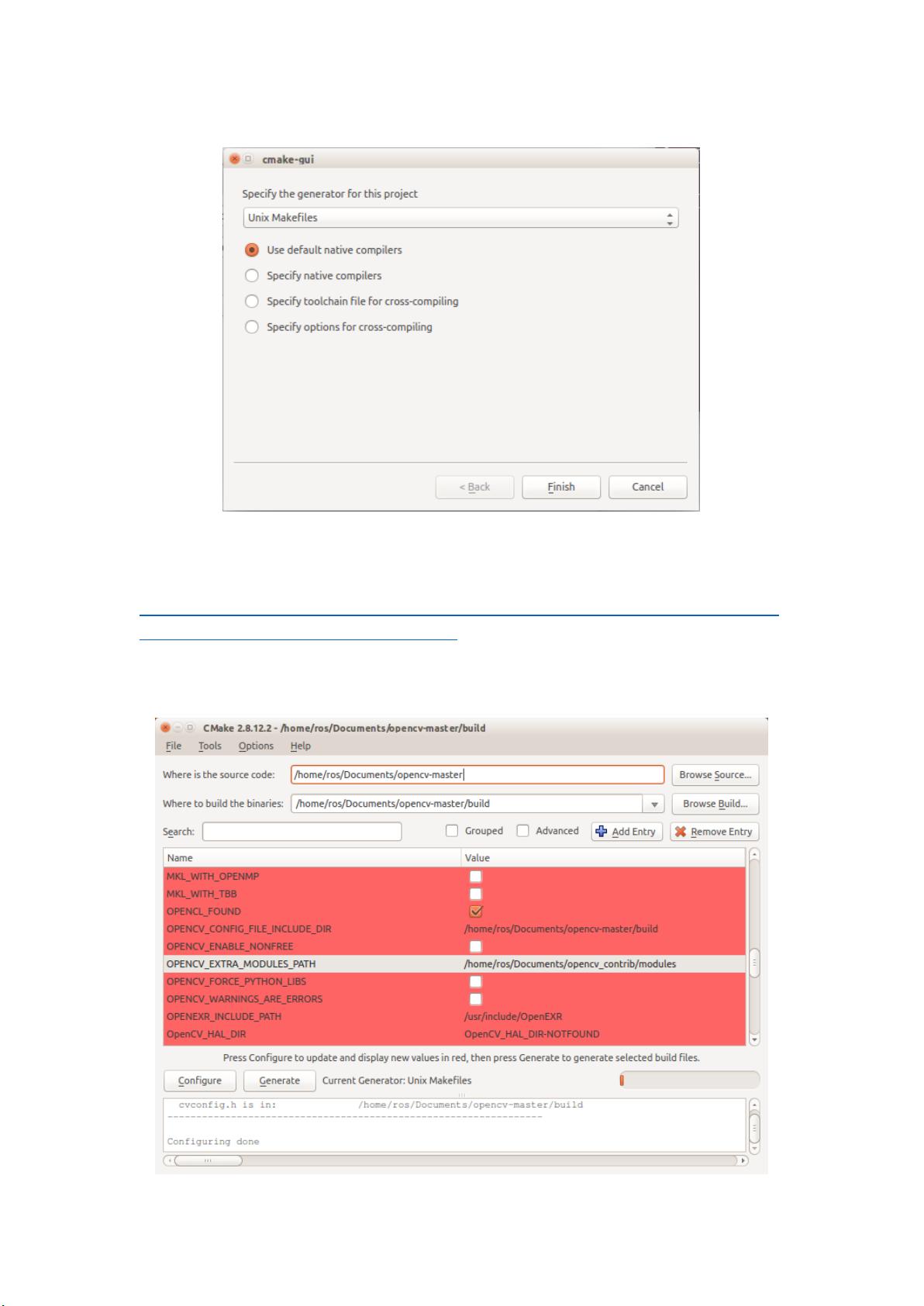
(2)编译安装 OpenCV(推荐使用)
编译安装步骤(参考地址:http://www.cnblogs.com/asmer-stone/p/5089764.html)
1.依赖关系:
GCC 4.4.x or later
CMake 2.8.7 or higher
Git
GTK+2.x or higher, including headers (libgtk2.0-dev)
pkg-config
Python 2.6 or later and Numpy 1.5 or later with developer packages (python-dev, python-
numpy)

剩余53页未读,继续阅读













评论0