
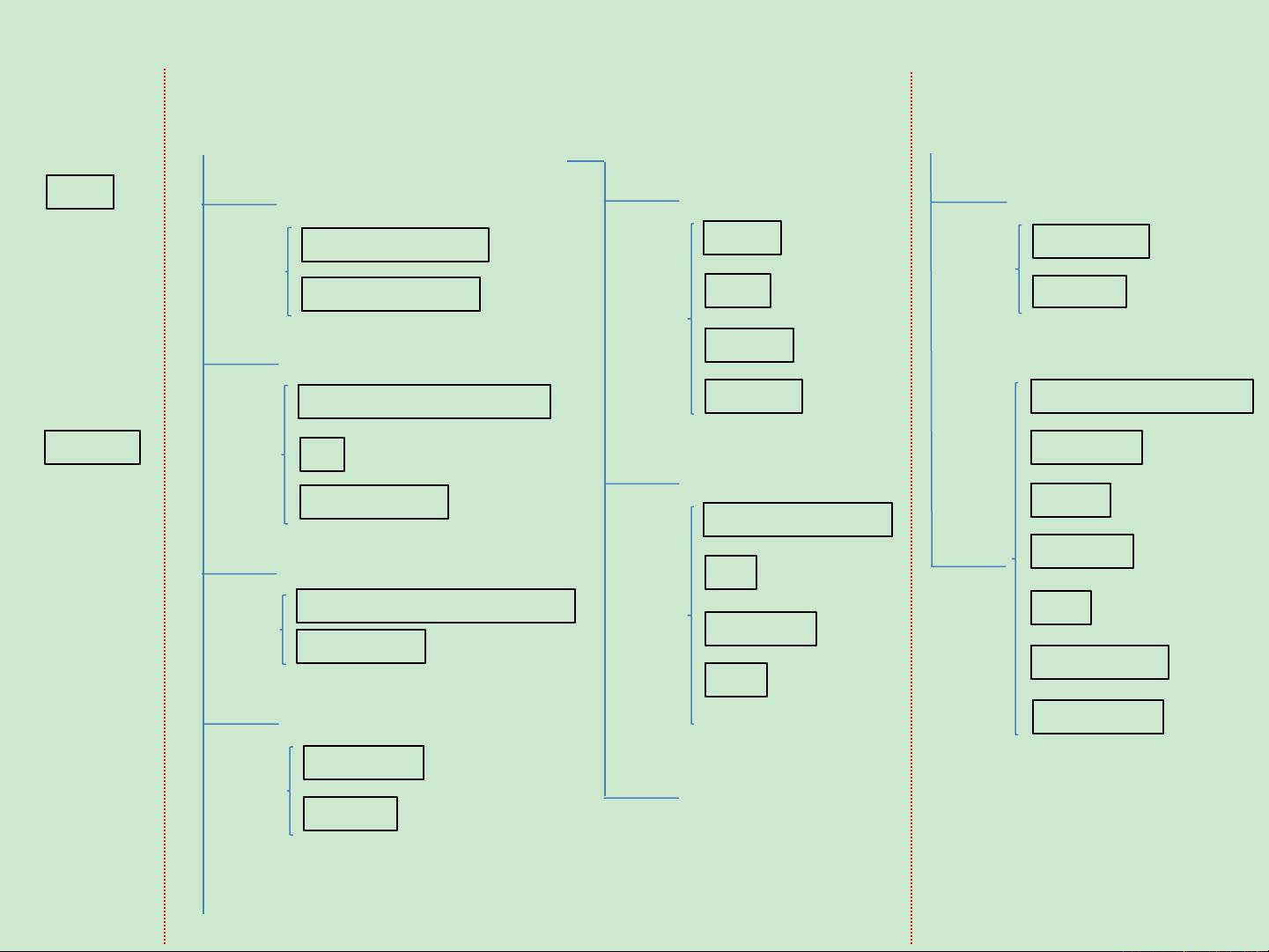
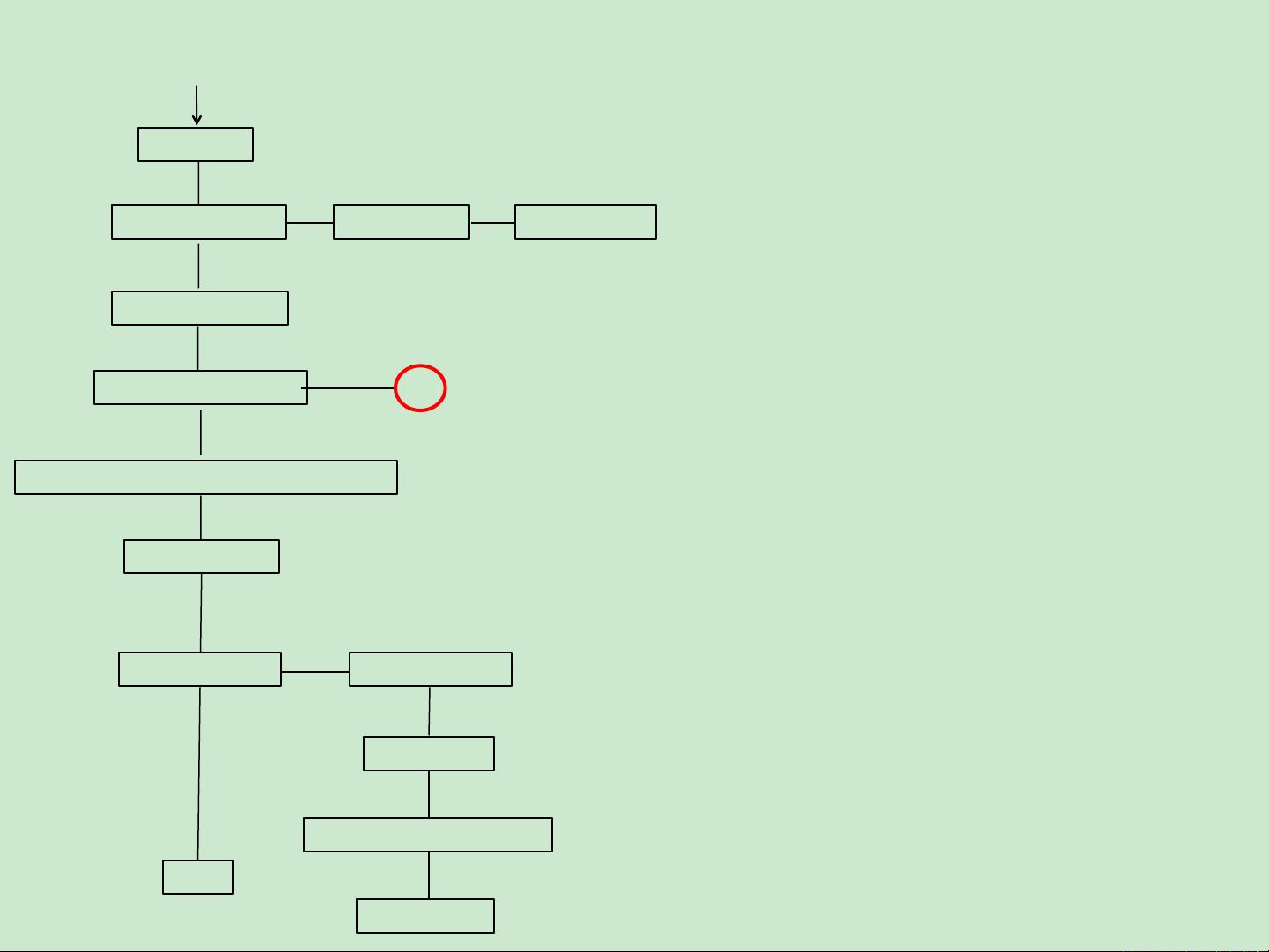
ICE-BA架构总结
App
main()
Backend
GlobalBundleAdjustor
LocalBundleAdjustor
BundleAdjustment
Geometry
Camera: info, intrinsic, depth
IMU
Coordinate Trans
IBA (Incremental Bundle Adjustment)
IBA: info, keyframe, point, … etc
Parameter Set
Matrix MXN.h
VectorN.h
LinearAlgebra
Frame
Map
Feature
LocalMap
GlobalMap
SIMD
Utility
Aligned Vector/Matrix
MultiThread
Timer
……
Visualization
Config
param.txt
Frontend
Camera Base
Distortion
cameras
Feature track & operation
ORB feature
pyramid
quaternion
timer
parameter load
draw and view
剩余11页未读,继续阅读
资源评论

 迎风的小锐锐2019-08-30里面有代码结构图,方便理解代码。附有关键算法讲解 。挺不错的
迎风的小锐锐2019-08-30里面有代码结构图,方便理解代码。附有关键算法讲解 。挺不错的

weixin_31823677
- 粉丝: 0
- 资源: 3









最新资源
- 使用Python和Pygame实现圣诞节动画效果
- 数据分析-49-客户细分-K-Means聚类分析
- 企业可持续发展性数据集,ESG数据集,公司可持续发展性数据(可用于多种企业可持续性研究场景)
- chapter9.zip
- 使用Python和Pygame库创建新年烟花动画效果
- 国际象棋检测10-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- turbovnc-2.2.6.x86-64.rpm
- 艾利和iriver Astell&Kern SP3000 V1.30升级固件
- VirtualGL-2.6.5.x86-64.rpm
- dbeaver-ce-24.3.1-x86-64-setup.exe
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


