
STAUBLI ROBOTICS TRAINING
Written by 张华君
首次编辑:
2015.09.15
最近编辑:
2015.09.15
1
/
6
史陶比尔(杭州)精密机械电子有限公司
杭州经济技术开发区围垦街 123 号(翔龙路口) - 邮编 310018
电话 +86 4006670066-1307
传真 +86 571 86912577
www.staubli.com.cn
如何添加 Addon
——机器人扩展指令的添加
一.前言
问:插件(Addon)是什么?
答:插件是机器人指令扩展包,用于丰富史陶比尔机器人的函数指令。
问:系统(System)、模拟器(Emulator)与插件(Addon)关系是什么?
答:系统(System):是装在CS8C控制器中的机器人操作系统。
模拟器(Emulator):是装在PC电脑中的机器人操作系统,主要供SRS2013编程使用。
插件(Addon):是机器人指令扩展包,可以安装于CS8C控制器或PC电脑中,且是免费的。
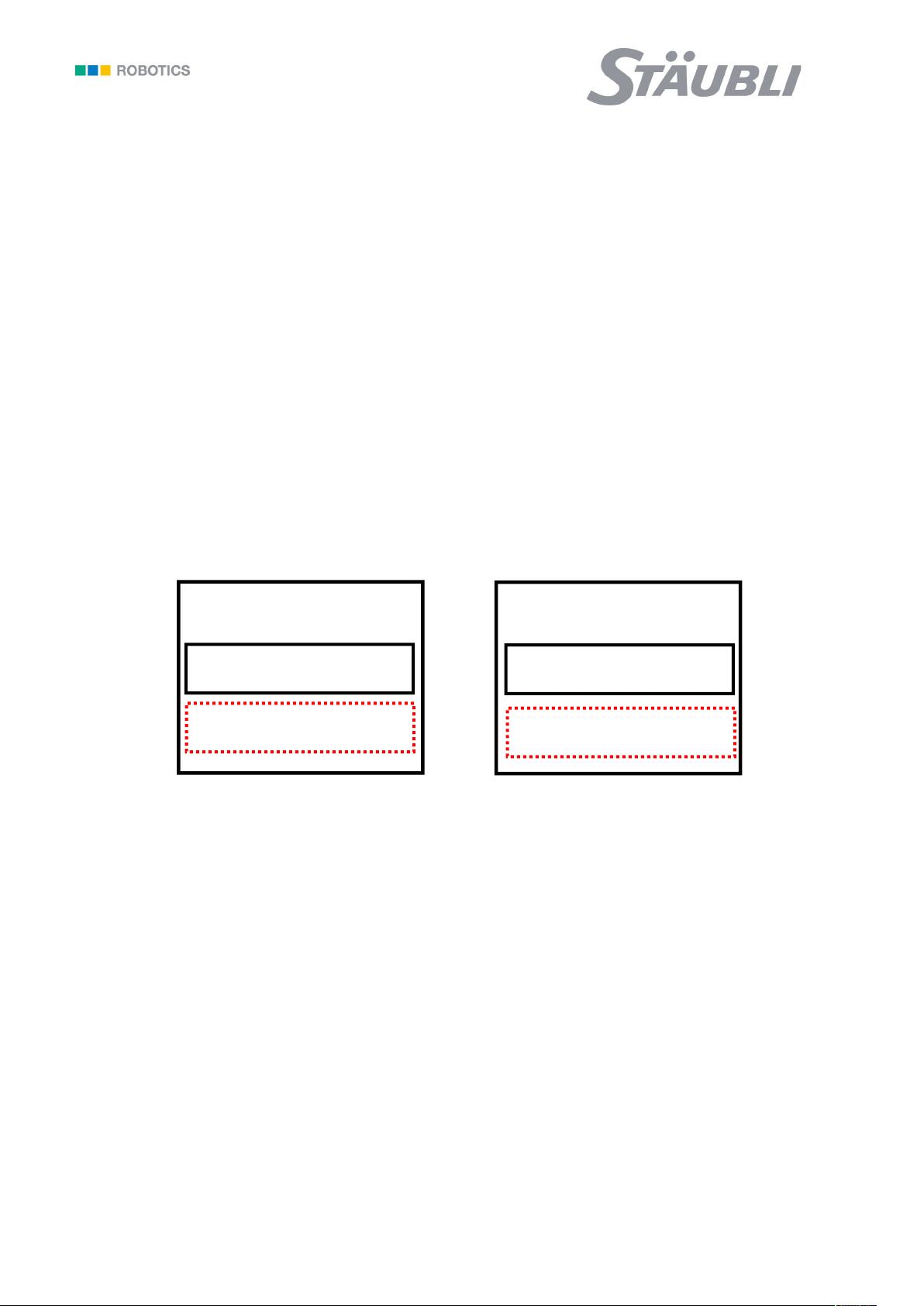
史陶比尔机器人控制器的版本经常会更新,犹如苹果的IOS和谷歌的Android,可以是为了修正某个Bug或
则 增 添 某 些功 能 。 每 更 新 一 个 新 版 本 的 系 统 ( System ) , 就 会 同 时 发 布 一 个 与 之 匹 配 的 模 拟 器
(Emulator)及插件(Addon)。
System
CS8C 控制器
PC 电脑
Emulator
Addon
Addon
问:插件(Addon)有哪些?
答:Addon其实是插件的总称,具体有6个文件,分别是:
Expansion、Motion、Recorder、Relbo、Remote、Velocity
问:机器人是否需要安装插件(Addon)?
答:若运行的应用程序包含了插件的指令,就必须安装,否则应用程序是无法运行的。
资源评论


weixin_31425115
- 粉丝: 4
- 资源: 31









最新资源
- 国际象棋检测2-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- ssd5课件图片记录保存
- 常用算法介绍与学习资源汇总
- Python与Pygame实现带特效的圣诞节场景模拟程序
- 国际象棋检测11-YOLO(v7至v9)、COCO、Darknet、Paligemma、VOC数据集合集.rar
- 使用Python和matplotlib库绘制爱心图形的技术教程
- Java外卖项目(瑞吉外卖项目的扩展)
- 必应图片壁纸Python爬虫代码bing-img.zip
- 基于Pygame库实现新年烟花效果的Python代码
- 浪漫节日代码 - 爱心代码、圣诞树代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


