






实验 11 RS485 通信实验
本章我们将向大家介绍如何利用 STM32 的串口实现 485 通信(半双工)。
在本章中,我们将利用 STM32 的串口 2 来实现开发板与上位机之间的 485 通
信,通过在串口助手上输入字符发送到单片机上后在发送到串口助手上显示。本
章分为以下学习目标:
1、了解 485 通信。
2、学会 485 通信。
1.1 485 简介
485(一般称作 RS485/EIA-485)是隶属于 OSI 模型物理层的电气特性规定为 2 线,
半双工,多点通信的标准。它的电气特性和 RS-232 大不一样。用缆线两端的电压差值来表
示传递信号。RS485 仅仅规定了接受端和发送端的电气特性。它没有规定或推荐任何数据协
议。
RS485 的特点包括:
1) 接口电平低,不易损坏芯片。RS485 的电气特性:逻辑“ 1”以两线间的电压差为
+(2~6)V 表示;逻辑“ 0”以两线间的电压差为-(2~6)V 表示。接口信号电平比 RS232
降低了,不易损坏接口电路的芯片,且该电平与 TTL 电平兼容,可方便与 TTL 电
路连接。
2) 传输速率高。 10 米时, RS485 的数据最高传输速率可达 35Mbps,在 1200m 时,
传输速度可达 100Kbps。
3) 抗干扰能力强。 RS485 接口是采用平衡驱动器和差分接收器的组合,抗共模干扰
能力增强,即抗噪声干扰性好。
4) 传输距离远, 支持节点多。 RS485 总线最长可以传输 1200m 以上(速率≤100Kbps)
一般最大支持 32 个节点,如果使用特制的 485 芯片,可以达到 128 个或者 256
个节点,最大的可以支持到 400 个节点。
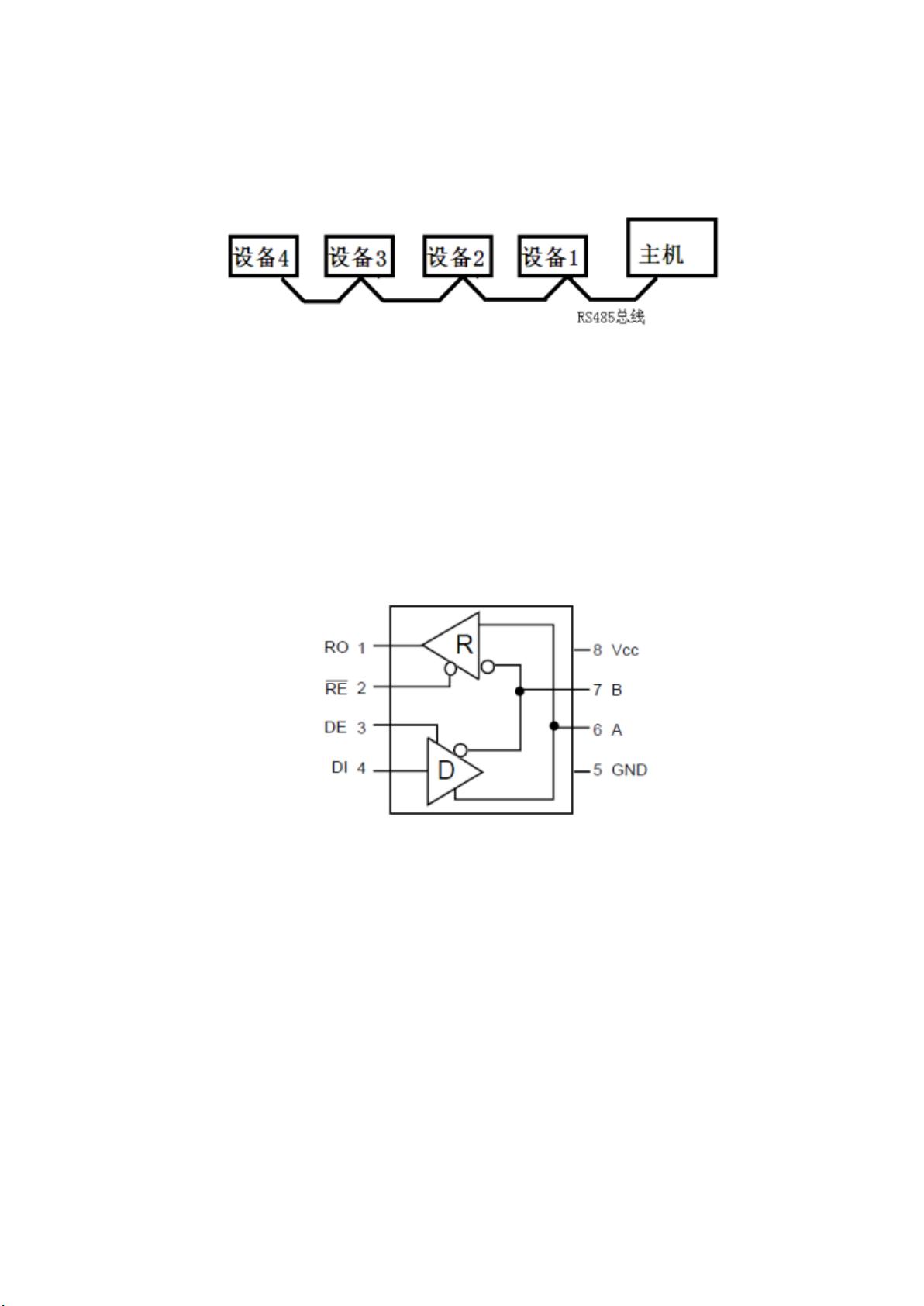
RS485 推荐使用在点对点网络中,线型,总线型,不能是星型,环型网络。理想情况下
RS485 需要 2 个匹配电阻,其阻值要求等于传输电缆的特性阻抗(一般为 120Ω )。没有特
性阻抗的话,当所有的设备都静止或者没有能量的时候就会产生噪声,而且线移需要双端的














- 1
- 2
前往页