
机器视觉系统设计方法
1 设计基础
1.1 问题定义
对检测问题的定义是机器视觉系统设计的前提和基础,其涉及的方面较多,主要部分方
面包括:(1)检测任务:任务描述;现有操作方法;约束条件。(2)检测对象:对象描述;
对象尺寸及其差异。(3)性能要求:精度;检测速度。其它还包括工况等。
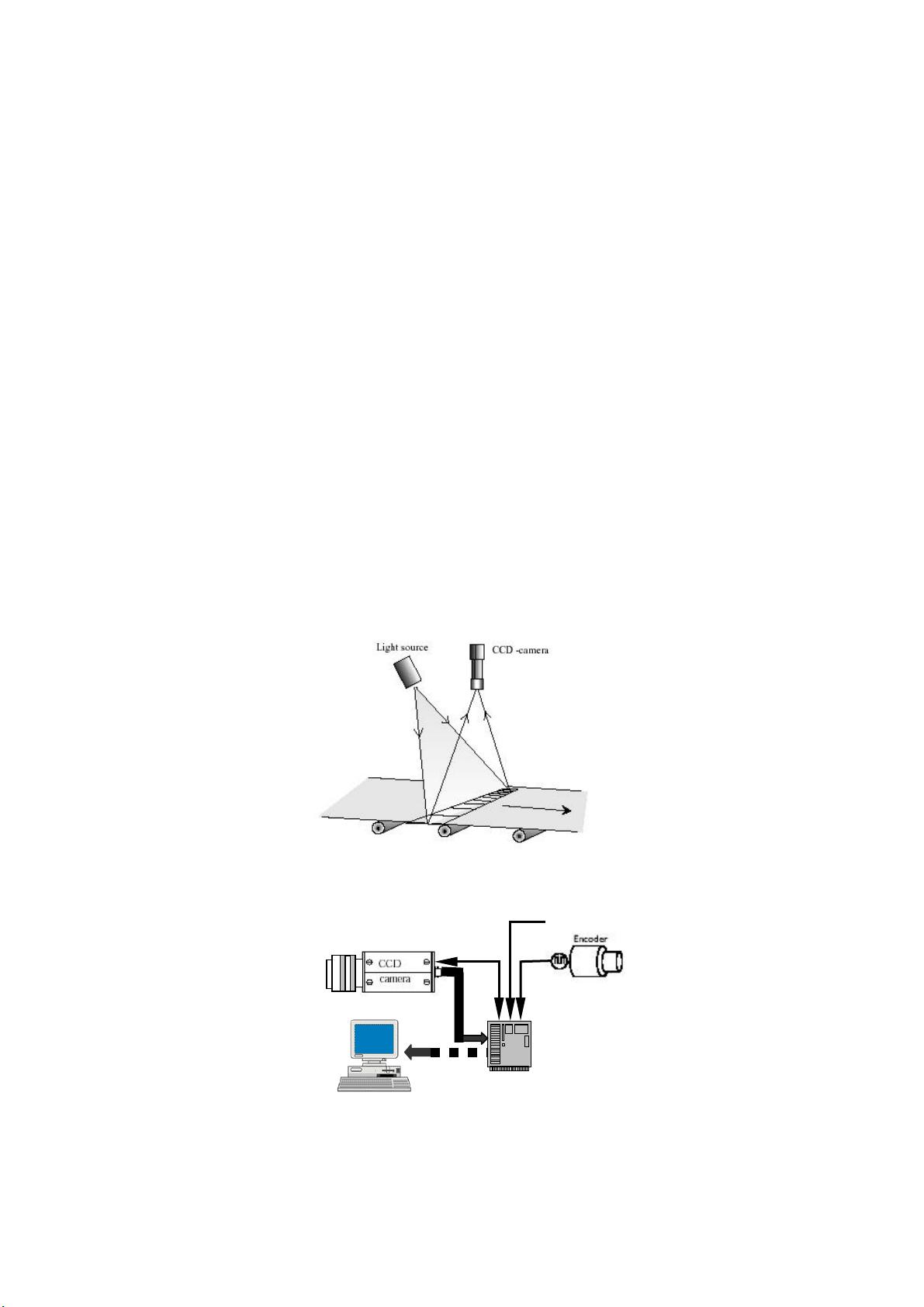
1.2 视场
视场(Field of View)即成像于相机焦距平面的物平面总面积。视场在一个方向的计算公
式为
)1)((
avp
PLDFOV ++= (1)
其中:FOV 为视场在一个方向上的尺寸;D
p
为该方向上的最大尺寸;L
v
为定位可能存在的
最大变化;P
a
为预留的余量,其主要考虑到相机定位可能存在误差等,该值一般可取 10%。
1.3 分辨率
在机器视觉中有很多类分辨率,由于个体的理解差异和使用习惯,用法各异,需根据上
下文进行理解。本文对其进行了梳理,具体如表 1 所示。
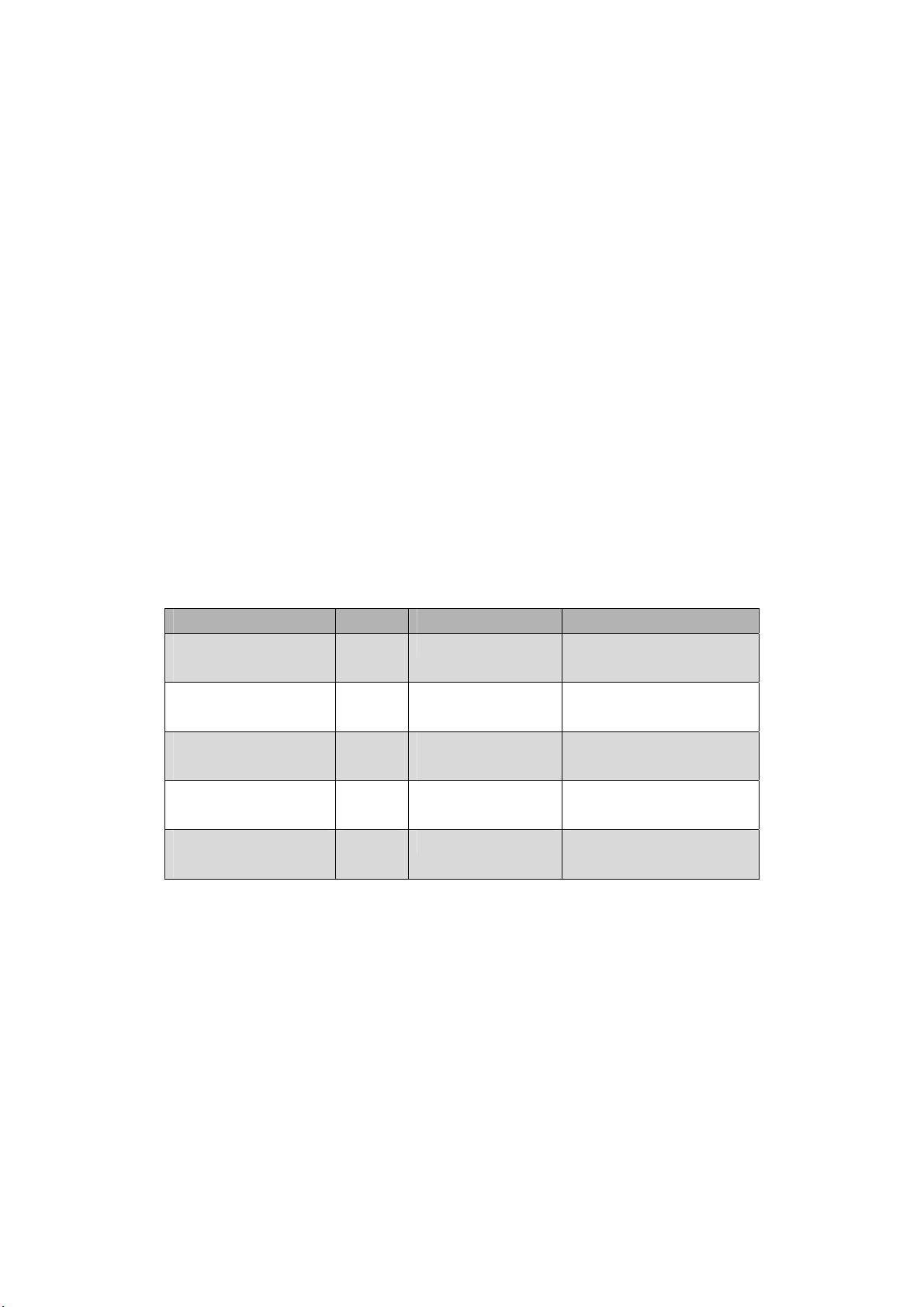
表 1 分辨率术语梳理
术语 单位 描述 影响因素
1 图像分辨率
(Image Resolution)
pixels
一帧图像的行列数 相机的图像传感器
2 空间分辨率
(Space Resolution)
mm/pixel
每个像素对应成像物
体的物理长度
图像分辨率;镜头的放大倍数
3 特征分辨率
(Feature Resolution)
mm
系统可以稳定成像的
最小特征
Shannon’s Sampling Theorem
4 测量分辨率
(Measurement Resolution)
mm
可检测到的尺寸(位
置)最小变化
可用的相关像素数目;相关像
素的误差;拟合算法
5 像素分辨率
(Pixel Resolution)
bits
像素的位数 取决于相机或图像采集卡中
的 ADC 位数
机器视觉系统不但可用于检测特征,并且可用于检测尺寸和位置的变化。下面两组公式是
最常用到的
(1)特征检测
=
=
si
pfs
RFOVR
FRR
/
/
(2)
其中:R
s
为空间分辨率;R
f
为特征分辨率;F
p
可识别特征包含的最少像素数目,根据 Shannon’s
Sampling Theorem 其最小为 2,实际应用中,在图像对比度强并且信噪比高的情况下,最小
为 3~4;R
i
为图像分辨率;FOV 为该方向的视场尺寸。
(2)尺寸(位置)变化检测
剩余20页未读,继续阅读
资源评论


weijialing4268257
- 粉丝: 0
- 资源: 2









最新资源
- 基于Spring+vue的IT技术交流和分享平台.zip
- django学生在线考试系统-7k6gs-(源码+数据库+论文+PPT+包调试+一对一指导)
- 红外和可见光图像融合,红外和可见光图像融合目的Python实现源码(高分项目)
- HCIE网工面试:STP/RSTP/MSTP及网络协议详解与优化
- FTP服务器端和客户端安装FileZilla-Server-1.9.4 and FileZilla-Client-3.68.1for Windows
- 红外和可见光图像融合-红外和可见光图像融合目的Python实现源码
- open3d-devel-windows-amd64-0.18.0.zip
- C#程序设计使用ADO.NET操作
- alertmanager-0.28.0-rc.0.linux-amd64.tar.gz
- Landast 7 多波段影像.zip
- git操作整理集合知识点
- Linux 常用命令:从基础到进阶全掌握
- docker操作记录整理汇合
- 毛玻璃个人引导页 HTML单页,无后台
- Certd-开源免费的自动化SSL证书管理工具
- c++酒店管理系统项目代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


