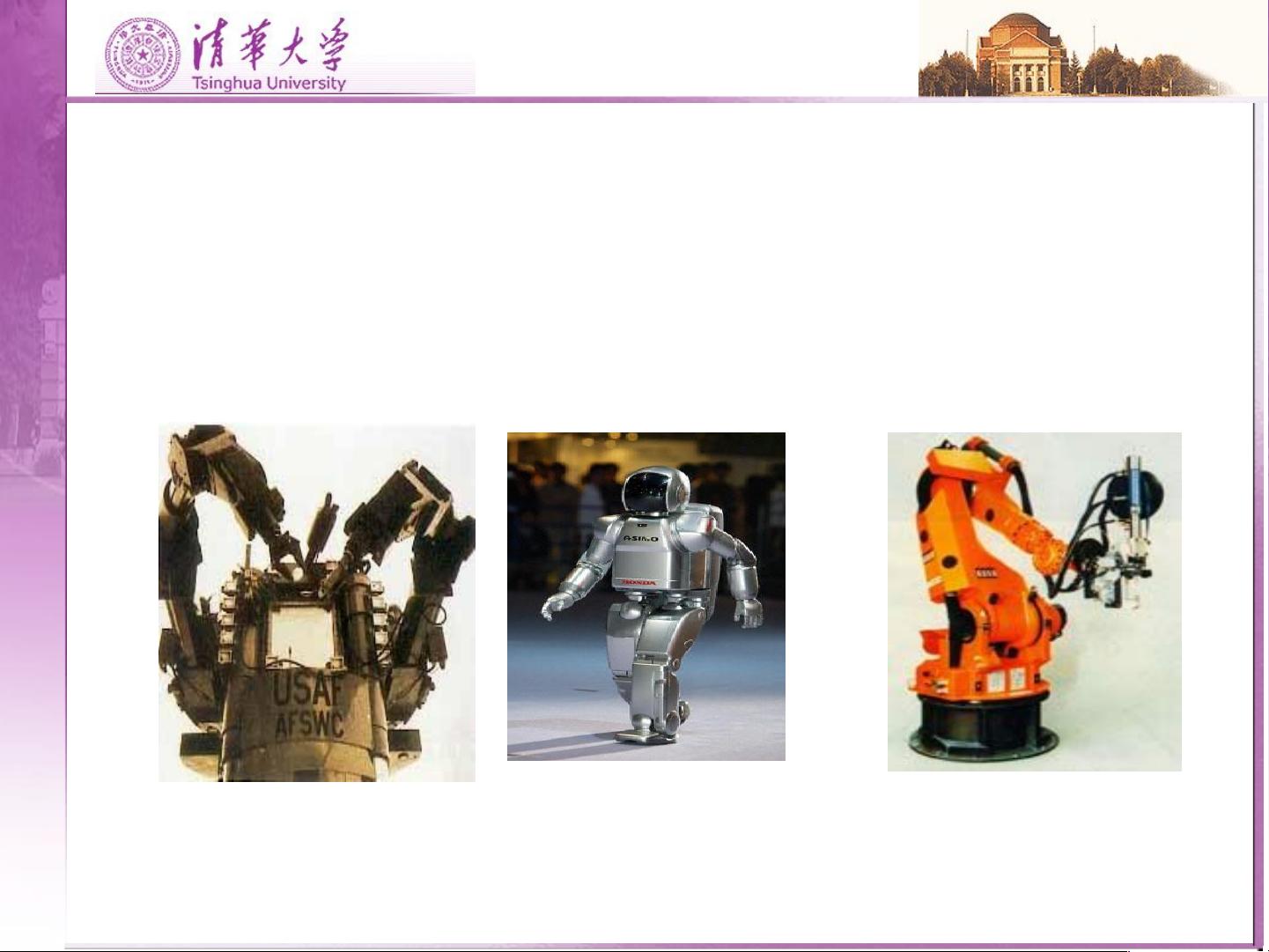
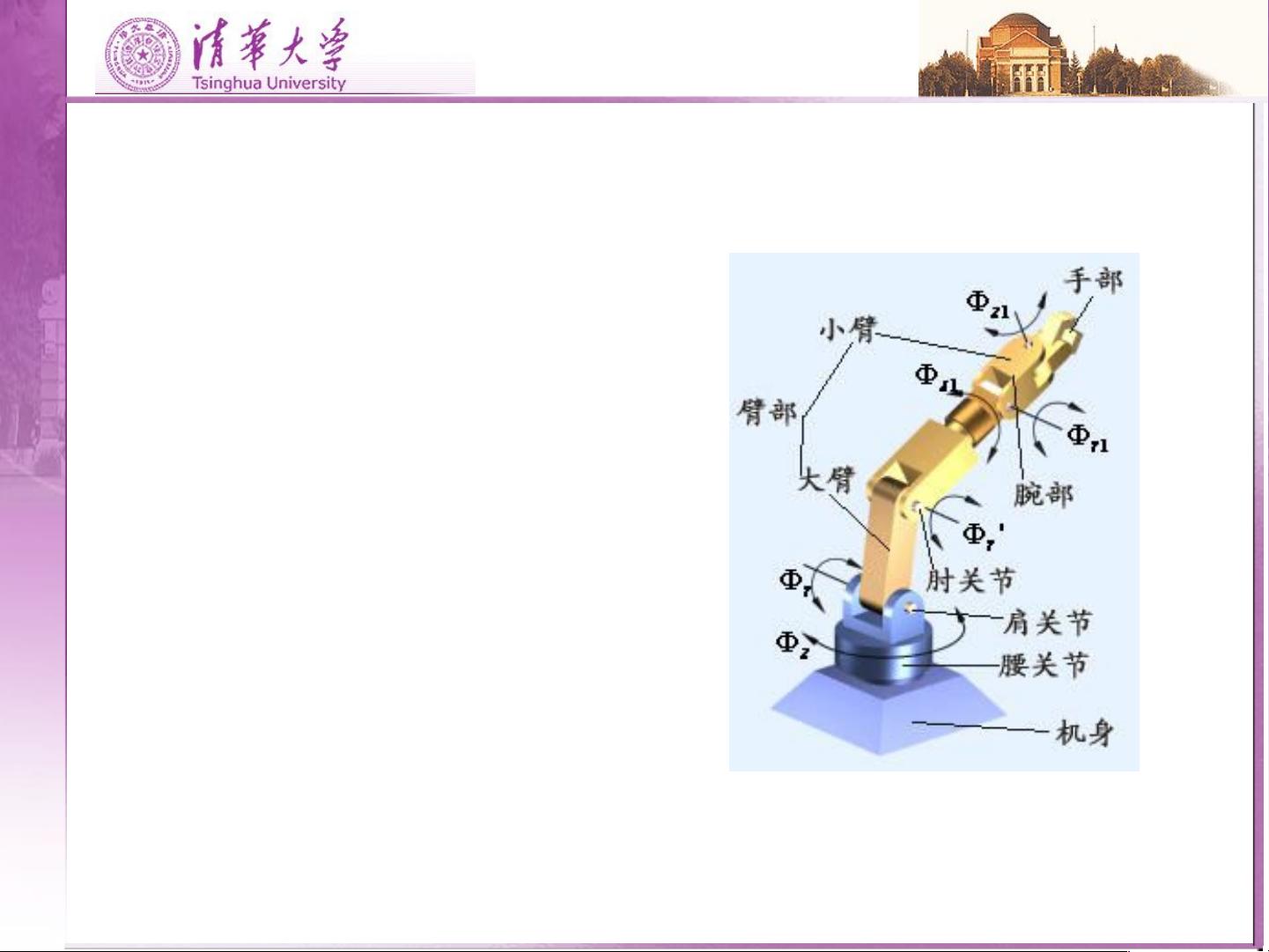
机械原理第 9 章:开式链机构 机械原理是机械工程领域的基础课程,旨在介绍机械系统的基本原理和机械设计方法。开式链机构是机械系统中的一种基本结构形式,它广泛应用于机器人、机械手、自动化系统等领域。 9.1 开式链机构的特点及应用 开式链机构是一种灵活的、万能的、具有多目的用途的自动化系统。它具有以下特点: * 开式运动链中末端构件的运动与闭式运动链中任何构件的运动相比,更为任意和复杂多样。 * 开式链机构需要更多的原动机来实现确定的运动。 * 开式链机构在各种机器人和机械手中得到了广泛的应用,例如铆接机器人、本田公司机器人等。 9.2 开式链机构的结构分析 开式链机构的结构分析是机械设计的重要步骤。操作器是机器人的执行系统,是机器人握持工具或工件,完成各种运动和操作任务的机械部分。操作器的组成包括机身、臂部、腕部和手部等。操作器的自由度是指操作器中各运动部件自由度的总和, F = f i 。 操作器的自由度有以下特点: * 操作器的主运动链通常是一个装在固定机架上的开式运动链。 * 操作器中的运动副仅包含单白由度的运动副——转动关节和移动关节。 * 操作器臂部的运动称为操作器的主运动,臂部各关节称为操作器的基本关节。 9.2.2 操作器的自由度 操作器的自由度是指操作器臂部的自由度,包括臂部自由度和腕部自由度。臂部自由度是指臂部在空间中的自由度,腕部自由度是指腕部在空间中的自由度。操作器的自由度结论: * 为了使操作器手部能够达到空间任一指定位置,通用的空间机器人操作器臂部应至少具有 3 个自由度。 * 为了使操作器手部能够达到平面任一指定位置,通用的平面机器人操作器臂部应至少具有 2 个自由度。 9.2.3 操作器的自由度冗余自由度 操作器自由度数大于 6 时,手爪可绕过障碍到达一定的位置。冗余自由度可以使操作器的手爪能够避免障碍,达到指定的位置。 9.2.3 操作器的结构分类 操作器的结构可以分类为直角坐标型、圆柱坐标型和球坐标型。每种结构都有其优点和缺点。 * 直角坐标型:结构简单,运动直观性强,便于实现高精度。缺点:占据空间大,相应的工作范围小。 * 圆柱坐标型:运动直观性强,占据空间较小,结构紧凑,工作范围大。缺点:受升降机构的限制,一般不能提升地面或较低位置的工件。 * 球坐标型:占据空间小,工作范围大,可绕过障碍物提取工件。缺点:运动直现性差,结构较复杂,臂端的位置误差会随臂的伸长而放大。 机械原理第 9 章:开式链机构对机器人和机械手的设计和应用具有重要的影响。了解开式链机构的特点、结构和自由度是机械设计的重要步骤。
剩余31页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~