
ProxImaL: Efficient Image Optimization using Proximal Algorithms
Felix Heide
1,2
Steven Diamond
1
Matthias Nießner
1
Jonathan Ragan-Kelley
1
Wolfgang Heidrich
3,2
Gordon Wetzstein
1
1
Stanford University
2
University of British Columbia
3
KAUST
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
t
Burst Denoising
Poisson Deconvolution
Phase Retrieval
ProxImaL Code and DAG
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
B
B
B
B
B
B
B
B
B
B
B
B
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
R
R
R
R
R
R
R
R
R
R
R
R
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
G
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
t
x
data_term
grad_sparsity
objective
p
=
Variable
(300, 300, 3)
=
poisson_norm
(
conv
(x, psf) - input )
=
norm1
(
grad
(x) )
= data_term + grad_sparsity +
nonneg
(x)
=
Problem
( objective )
p.solve()
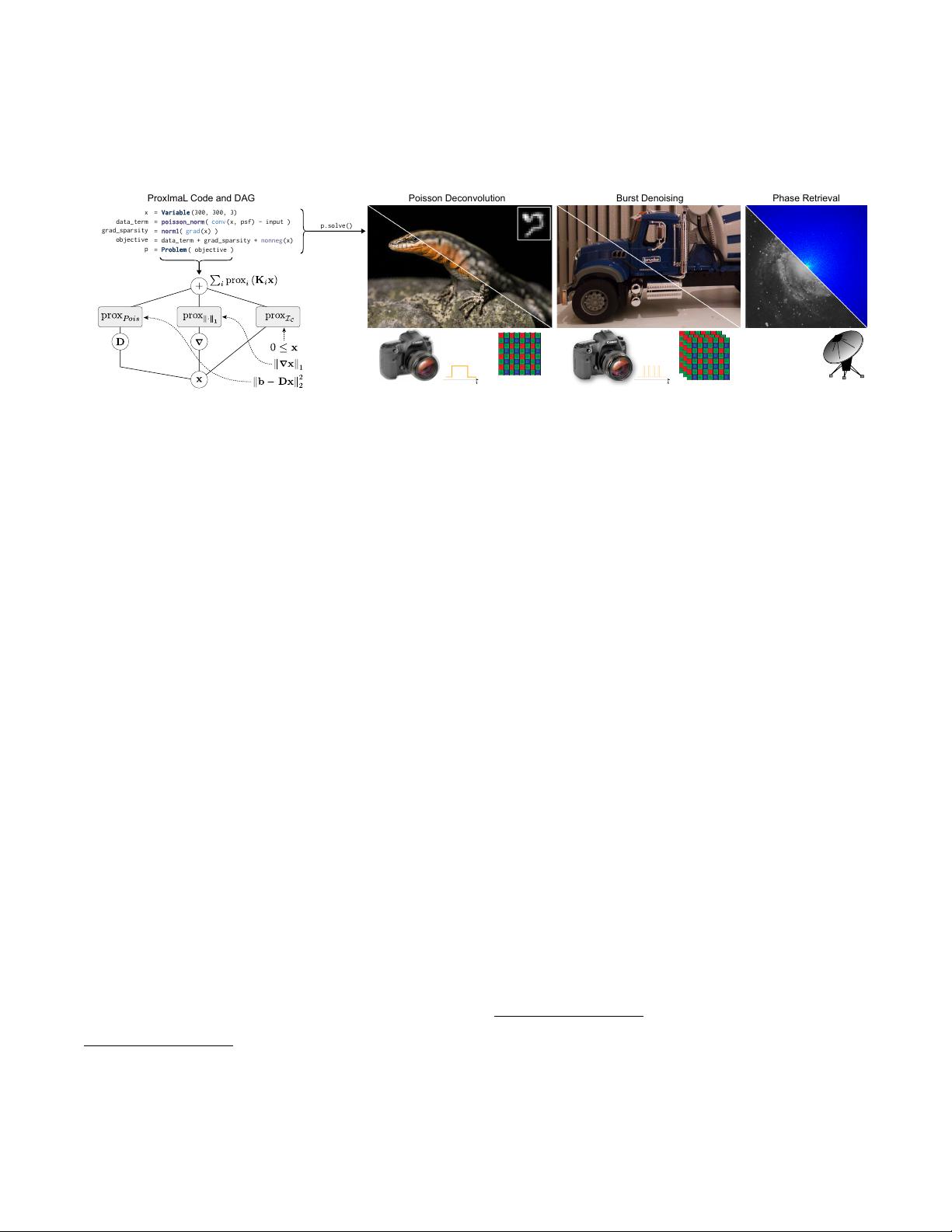
Figure 1:
As a domain-specific language, ProxImaL makes it easy to prototype a range of inverse problems in imaging. For example, we show
ProxImaL code for deconvolution in the presence of Poisson-distributed shot noise and the corresponding directed acyclic graph (DAG, left)
as well as the results generated by the compiled optimization algorithm (center left). The ProxImaL language makes it easy to prototype
highly-efficient optimization routines for problems as diverse as denoising a stack of images (center right), or even nonlinear problems such
as phase retrieval (right). For any of these applications, ProxImaL allows for different penalty functions, advanced image priors, and also
different optimization algorithms to be rapidly evaluated. We demonstrate state-of-the-art results for these and other imaging applications.
Abstract
Computational photography systems are becoming increasingly
diverse, while computational resources—for example on mobile
platforms—are rapidly increasing. As diverse as these camera sys-
tems may be, slightly different variants of the underlying image
processing tasks, such as demosaicking, deconvolution, denoising,
inpainting, image fusion, and alignment, are shared between all of
these systems. Formal optimization methods have recently been
demonstrated to achieve state-of-the-art quality for many of these
applications. Unfortunately, different combinations of natural image
priors and optimization algorithms may be optimal for different prob-
lems, and implementing and testing each combination is currently
a time-consuming and error-prone process. ProxImaL is a domain-
specific language and compiler for image optimization problems
that makes it easy to experiment with different problem formulations
and algorithm choices. The language uses proximal operators as
the fundamental building blocks of a variety of linear and nonlinear
image formation models and cost functions, advanced image pri-
ors, and noise models. The compiler intelligently chooses the best
way to translate a problem formulation and choice of optimization
algorithm into an efficient solver implementation. In applications
to the image processing pipeline, deconvolution in the presence of
Poisson-distributed shot noise, and burst denoising, we show that
a few lines of ProxImaL code can generate highly efficient solvers
that achieve state-of-the-art results. We also show applications to
the nonlinear and nonconvex problem of phase retrieval.
Keywords:
computational photography, digital image processing,
optimization
Concepts: •Computing methodologies →
Computational photo-
graphy; Regularization;
•Mathematics of computing →
Continu-
ous optimization; Solvers;
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are not
made or distributed for profit or commercial advantage and that copies bear
this notice and the full citation on the first page. Copyrights for components
of this work owned by others than the author(s) must be honored. Abstracting
1 Introduction
Digital image processing is a research area with a wide variety of ap-
plications in computational photography, computer vision, robotics,
scientific imaging, remote sensing, microscopy, and computer graph-
ics. Traditionally, image processing algorithms have been tailored
independently to each of these applications, with few techniques
that generalize across fields. Researchers have recognized that all
these applications share the fundamental task of recovering informa-
tion from blurry, noisy, saturated, sparsely or indirectly sampled, or
otherwise corrupted measurements. In particular, the information re-
covery task can be formulated as an optimization problem. Methods
that approach image processing as solving an optimization problem
have achieved state-of-the-art results in many classical applications,
for example the demosaicking, deconvolution, and inpainting tasks
of the image processing pipeline [Heide et al. 2014].
Optimization-based image processing generalizes across application
areas, and thus, in theory, makes it easy to develop image processing
techniques for new domains. In practice, however, developing image
optimization methods can be difficult, because there are many ways
to frame an image processing task as an optimization problem, and
it is virtually impossible to predict which framing will yield the best
results. This requires researchers to experiment with a wide variety
of optimization approaches to see which works best for a given task.
For instance, consider the classic problem of deconvolution: we are
given measurements
b
that approximately satisfy
b = Dx
, where
D
is a linear operator representing convolution with a known kernel
and
x
is an unknown image. Our goal is to recover
x
given
b
. The
optimization-based approach to deconvolution is to say that
x
is the
with credit is permitted. To copy otherwise, or republish, to post on servers
or to redistribute to lists, requires prior specific permission and/or a fee.
Request permissions from permissions@acm.org.
©
2016 Copyright held by
the owner/author(s). Publication rights licensed to ACM.
SIGGRAPH ’16 Technical Paper,, July 24 - 28, 2016, Anaheim, CA,
ISBN: 978-1-4503-4279-7/16/07
DOI: http://dx.doi.org/10.1145/2897824.2925875


剩余14页未读,继续阅读
资源评论


起不了一点
- 粉丝: 0
- 资源: 2









最新资源
- Linux 操作系统入门:基础知识与实用技巧
- 三层电梯控制系统的模拟 PLC课程设计报告.doc
- 探索重庆高温对当地民生和经济的影响数据.zip
- 数据结构课程设计-数据结构课程设计-Huffman编码PDF
- GitLab DevOps工具的基础使用方法及CI/CD实践
- 基于Matlab实现三维比例导引仿真程序(源码).rar
- 海洋波浪监测浮标.zip
- <项目代码>YOLOv8 芝麻作物和杂草识别<目标检测>
- Oracle Cursor介绍PDF
- AGV小车(双工位左右滚筒式)工程图机械结构设计图纸和其它技术资料和技术方案非常好100%好用.zip
- 单片机智能客厅控制装置课程设计(Proteus仿真+代码+报告)
- 诺贝尔奖数据集.zip
- MATLAB代码:基于两阶段鲁棒优化算法的多微网联合调度及容量配置 关键词:多微网 优化调度 容量配置 两阶段鲁棒 仿真平台:MATLAB YALMIP+CPLEX 主要内容:代码主要做的是一个微
- 自动化批量安装ubuntu自动化批量安装ubuntuPDF
- MATLAB代码:基于主从博弈理论的共享储能与综合能源微dian网优化运行研究 关键词:主从博弈 共享储能 综合能源微dian网 优化调度 参考文档:基于主从博弈理论的共享储能与综合能源微dian
- Python中使用Django框架构建图书馆管理系统的案例分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


