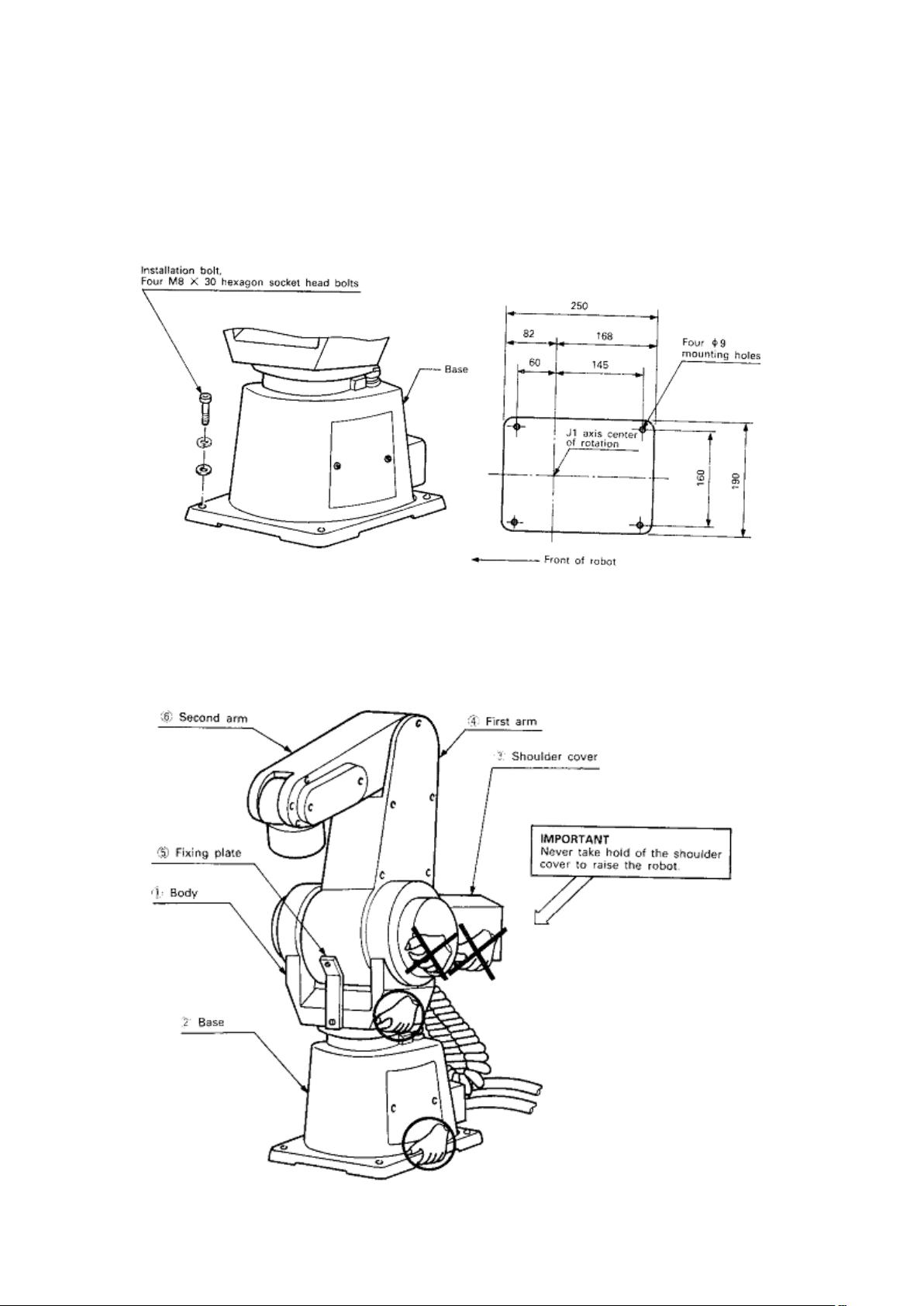
(1) 机器人移动时需如图展示的标准搬运。
(2) 在移动机器人前,需把膀臂一向正方向移动,膀臂二向负方向移动,直到都移动
到限位。
(3) 当提升机器人时,保持机器人在两膀之间和小腹之上。
(4) 不能搬运机器人的后盖。
(5) 机器人在移动过程中需如图所示状态。
警告:机器人必须和安装版一起移动。
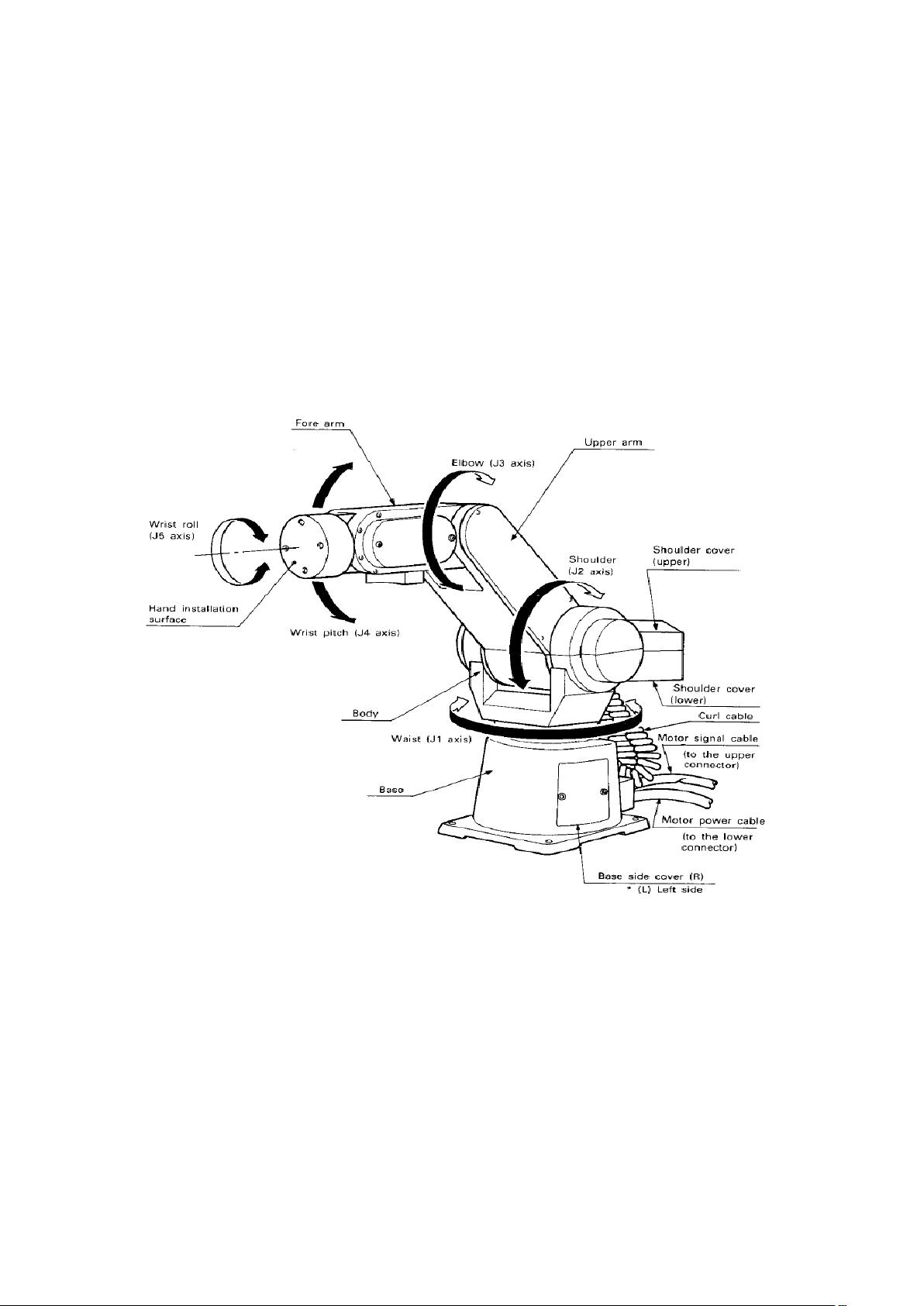
2.3机器人本体的结构组成
(1)外部视图
外部结构组成示意图
RV-M1 机器人为五轴机器人,分别为 :
J1 轴 1 <――> X
J2 轴 2 <――> Y
J3 轴 3 <――> Z
J4 轴 4 <――> P
J5 轴 5 <――> R
结构组成:
底座支撑、身体、上膀臂(大臂)、前膀臂(小臂)、卷腕器(手腕)、肩
上下盖、电机信号线、电动机电源线。