基于PIC单片机的自动清洁机器人的设计与实现X.docx
版权申诉
201 浏览量
2023-07-13
21:16:24
上传
评论
收藏 1.38MB DOCX 举报

摘要:探究一种可遥控可循迹自动清洁机器人测控系统的设计与实现,采用16 位单片
机PIC30F4011 作为核心,遥控模块采用RFC30F作为遥控信号的发射和接收,由红外反射式
传感器及相关外围电路构成传感器障碍物检测系统,移动轮通过L298n芯片驱动两独立直流
电机来控制。从而使自动清洁机器人实现有遥控和循迹两种工作模式,方便人们的生活起
居。
关键词:自动清洁机器人;PIC30F4011 单片机;遥控与传感;自动控制
0 引言
室内智能清洁机器人将移动机器人技术和吸尘器技术有机地融合起来,实现
室内地面环境的半自动或全自动清洁,替代传统繁重的人工清洁工作,近年来已
受到国内外研究人员的重视。PIC30F 系列单片机是由美国 microchip 公司的 Pic 系列单
片机,由于其超小型、低功耗、低成本、多品种等特点,已广泛应用于工业控制、仪器、仪
表、通信、家电、玩具等领域。本文主要探究自动清洁机器人的设计与实现,最终通过软硬
件的合理设计与实验实现清洁机器人的遥控与自动循迹的两种控制模式,满足一般家具情况
下的自主清洁工作的要求。
1 系统的设计
1.1 硬件系统设计
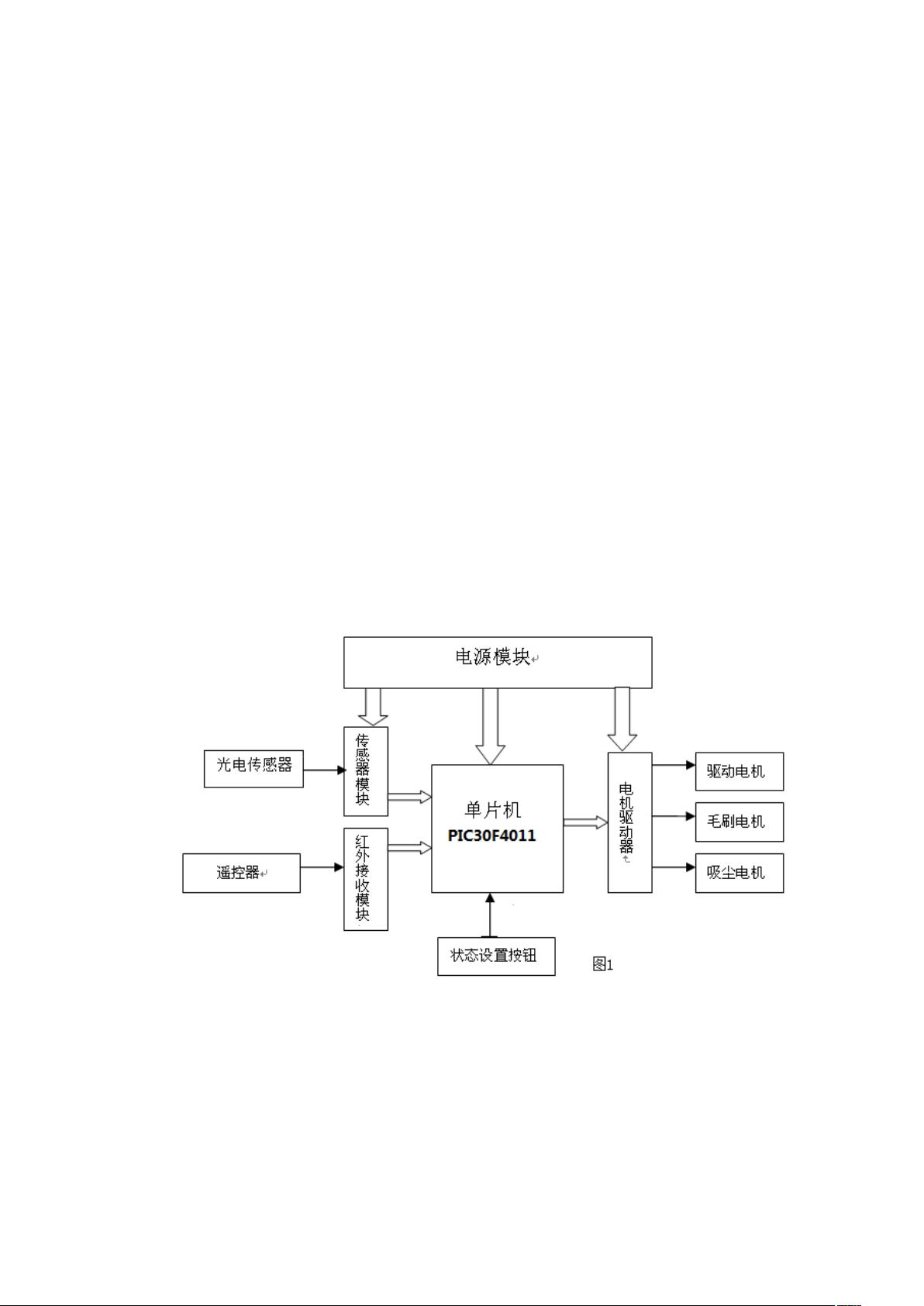
可以把自动清洁机器人系统分化为遥控发射与接收模块、光电传感模块、电机驱动
模块等三个模块。其硬件原理如图 1 所示。
该清洁机器人是一个以单片机为核心的运动控制系统.。单片机是系统的
主控单元,它以传感器检测到的信号和红外遥控器发送的信号作为系统的
输入,控制电机和风机的运转。
a. 主控制器. 主要由单片机 PIC30F4011 组成,主要功能是完成主控程序
与其它各模块的接口,是程序运行的载体并实现对整个机器人的控制。
资源评论


老帽爬新坡
- 粉丝: 83
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











