
摘要:本文主要论述了 BP 神经网络的结构及其 BP 神经网络的学习算法,进而
分析了传统 PID 控制器的优缺点,以及基于 BP 神经网络 PID 控制器的可行性。
本文还介绍了基于 BP 神经网络 PID 控制器的设计步骤、结构框图、控制算法。
并且通过 MATLAB 软件对 PID 控制器的设计进行仿真,并对仿真结果进行了分
析、总结。
关键词:BP 神经网络;PID 控制器;学习算法;MATLAB 仿真
1.引言
PID 控制是最早发展起来的控制策略之一,按偏差的比例、积分和微分进行
控制的调节器称为 PID 控制器,它是连续系统中技术成熟,应用最广泛的一种调
节器。由于其算法简单,实现简易、鲁棒性能良好和可靠性高,能够对很大一类
工业对象进行有效控制等一系列优点,尤其适用于可建立精确数学模型的确定性
控制系统传统的 PID 调节器由于其技术比较成熟。在目前, 工业控制系统调节使
用最为广泛的仍是典型的 PID 控制, 但在实际的情况中,当被控对象为非线性或
者时变特性时,参数的整定及在线自适应调整问题就难以解决。随着被控系统越
来越复杂,人们对控制系统的要求越来越高,特别是要求控制系统能香应不确定
性、时变的对象与环境。传统的基于精确模型的控制方法难以适应要求,现在关
于控制的概念也已更加广泛,它要求包括一些决策以及学习功能。因为 BP 神经
网络具有较好的在线监测能力,而神经网络是用大量简单的神经元连接组成的复
杂网络,具有人脑的功能的基本特征,为控制领域的研究开辟了新途径,尤其适用
于复杂过程、参数时变系统神经网络。BP 神经网络与 PID 控制器的结合能够起
到很好的控制效果。神经网络由于具有上述优点而越来越受到人们的重视。因此,
神经网络控制技术很适合应用于工业控制调节系统中。
2.BP 神经网络
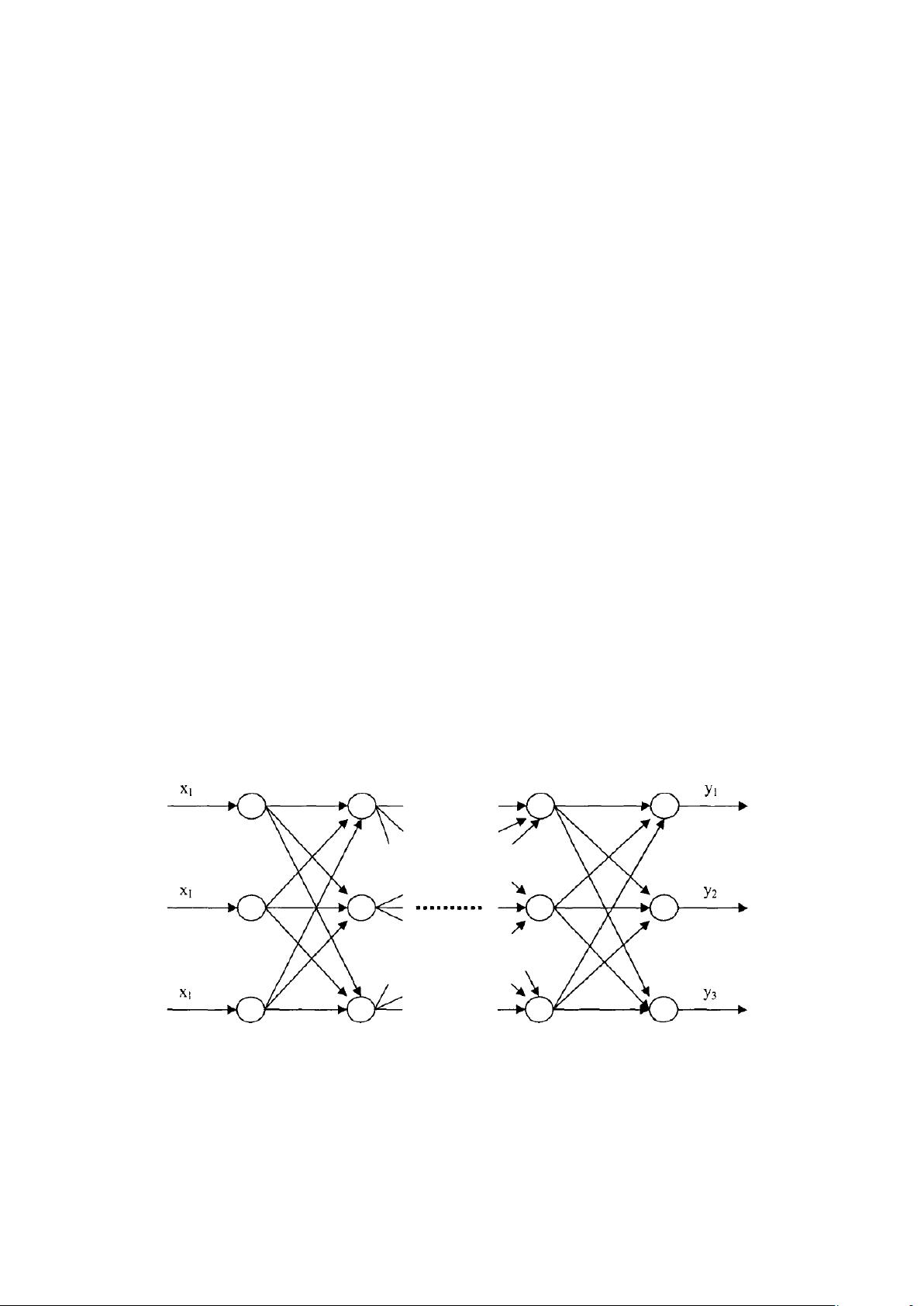
2.1 BP 神经网络结构
图 2-1 BP 神经网络结构图
BP 神经网络结构如图 2-1 所示。由图可见,BP 网络是一种具有三层或三层
以上神经元的神经网络,包括输入层、中间层和输出层。上下层之间实现全连接,
而每层神经元之间无连接。当一对学习样本提供给网络后神经元的激活值从输入

剩余11页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 99
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- Python 实现TCN-GRU时间卷积门控循环单元多输入单输出回归预测(含模型描述及示例代码)
- 创新流固耦合模拟煤层塌陷模型:基于fipy与pfc2d联合方法的多功能代码干货分享,创新流固耦合模拟煤层塌陷模型:基于fipy与pfc2d联合方法的多功能代码干货分享,该模型是模拟的煤层塌陷的pfc2
- Python 实现GA-RF遗传算法优化随机森林算法多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- 电机模型、PI控制器与PLL锁相环的标幺化处理详解:从理论到实践,采样时间处理全解析,电机模型、PI控制器与PLL锁相环的标幺化处理详解:从理论到实践,采样时间处理全解析,电机标幺化、PI标幺化、锁相
- 基于西门子S7-1200PLC的现代化创新立体车库:传统与未来科技结合的简约程序与仿真图纸及新能源汽车充电解决方案,基于西门子S7-1200PLC的立体车库创新设计:融合新能源汽车充电功能,简约而不简
- Python 实现WOA-BP鲸鱼优化算法优化BP神经网络多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- Python 实现SA-BP模拟退火算法优化BP神经网络多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- HCIP-Datacom题库.zip
- Python 实现GA-ELM遗传算法优化极限学习机多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- MinGW-w64安装指南.pdf
- Python 实现SA-ELM模拟退火算法优化极限学习机多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- numpy-2.2.0-cp311-cp311-win_amd64.whl
- Python 实现DRN深度残差网络多输入分类预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- PFC 5.0 流体与固体相互作用-流固耦合模型实战指南(实用干货版),PFC5.0流固耦合模型应用手册:干货满载的水力压裂与达西渗流常用案例集锦,该模型是“PFC2D流固耦合常用案例合集”: 其中
- Python 实现TSO-SVM金枪鱼群算法优化支持向量机多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- Yoast SEO Premium v24.6 – WordPress SEO 插件 全功能版-20250306-134428.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


