基于DSP的自适应滤波器设计.doc
版权申诉
70 浏览量
2023-06-20
11:34:53
上传
评论
收藏 416KB DOC 举报


摘要 ..................................................................................................................1
一.设计目的 ..................................................................................................2
二.设计原理及程序分析 ..............................................................................3
2.1 数字滤波器的基本概念..........................................................................................................................3
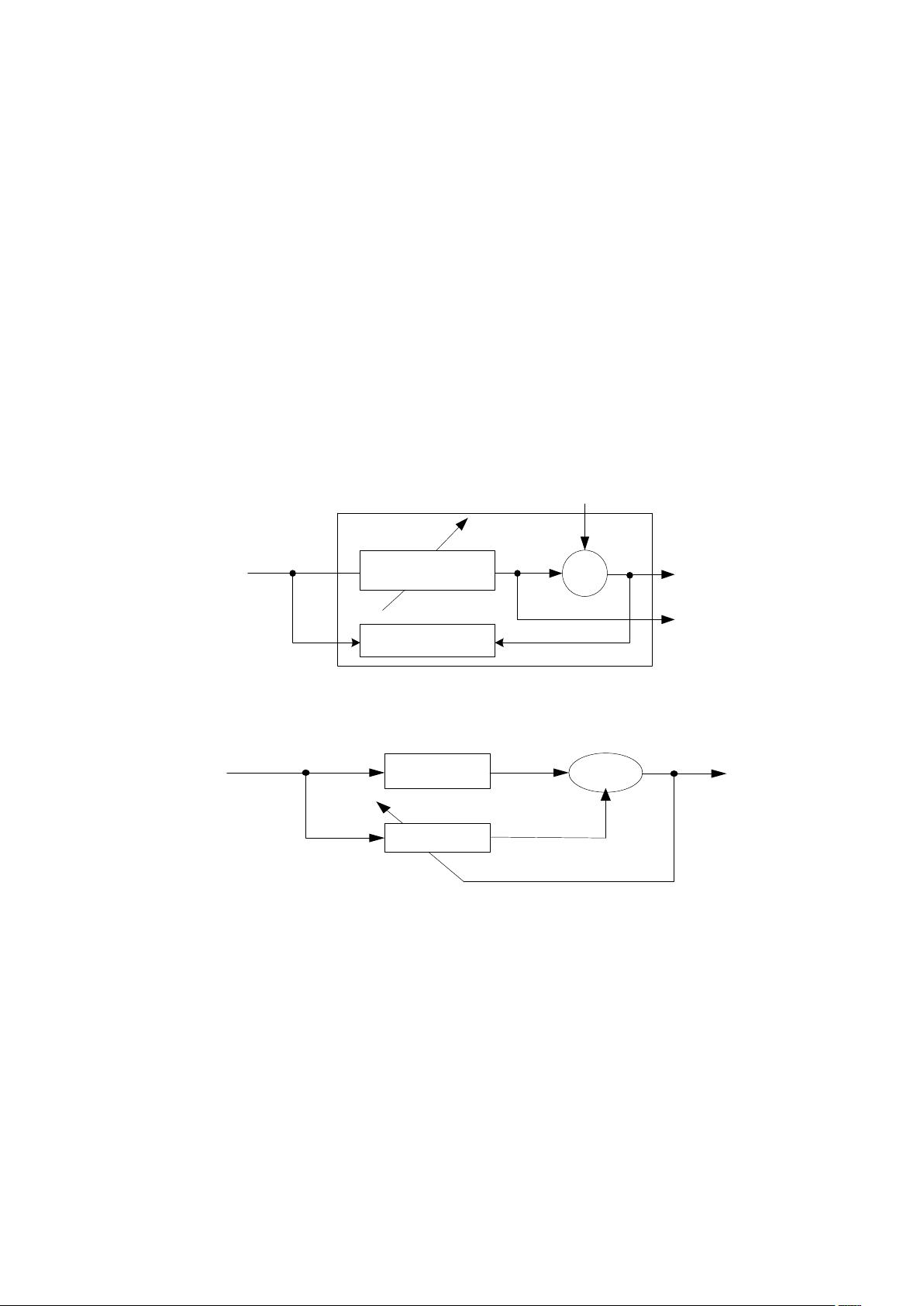
2.2 自适应滤波器原理..................................................................................................................................4
2.3 自适应滤波算法......................................................................................................................................5
2.3.1 最小均方算法(LMS)算法 ......................................................................................................5
2.4 基于 DSP 实现自适应滤波器 .............................................................................................................11
2.4.1 自适应滤波算法的 DSP 实现 .................................................................................................11
三.设计步骤 ................................................................................................14
四.设计心得 ................................................................................................15
五.参考文献 ................................................................................................15
附件源程序清单: ........................................................................................15
摘要
在科学技术高速发展的今天,由于在实际应用中,没有充足的信息来设计固定系数的


剩余20页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 79
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











