
712 IEEE TRANSACTIONS ON EVOLUTIONARY COMPUTATION, VOL. 11, NO. 6, DECEMBER 2007
MOEA/D: A Multiobjective Evolutionary Algorithm
Based on Decomposition
Qingfu Zhang, Senior Member, IEEE, and Hui Li
Abstract—Decomposition is a basic strategy in traditional mul-
tiobjective optimization. However, it has not yet been widely used
in multiobjective evolutionary optimization. This paper proposes
a multiobjective evolutionary algorithm based on decomposition
(MOEA/D). It decomposes a multiobjective optimization problem
into a number of scalar optimization subproblems and optimizes
them simultaneously. Each subproblem is optimized by only
using information from its several neighboring subproblems,
which makes MOEA/D have lower computational complexity at
each generation than MOGLS and nondominated sorting genetic
algorithm II (NSGA-II). Experimental results have demonstrated
that MOEA/D with simple decomposition methods outperforms
or performs similarly to MOGLS and NSGA-II on multiobjective
0–1 knapsack problems and continuous multiobjective optimiza-
tion problems. It has been shown that MOEA/D using objective
normalization can deal with disparately-scaled objectives, and
MOEA/D with an advanced decomposition method can generate
a set of very evenly distributed solutions for 3-objective test
instances. The ability of MOEA/D with small population, the scal-
ability and sensitivity of MOEA/D have also been experimentally
investigated in this paper.
Index Terms—Computational complexity, decomposition, evolu-
tionary algorithm, multiobjective optimization, Pareto optimality.
I. INTRODUCTION
A
multiobjective optimization problem (MOP) can be stated
as follows:
(1)
where
is the decision (variable) space, consists
of
real-valued objective functions and is called the ob-
jective space. The attainable objective set is defined as the set
.
If
, all the objectives are continuous and is de-
scribed by
where are continuous functions, we call (1) a continuous
MOP.
Very often, since the objectives in (1) contradict each other,
no point in
maximizes all the objectives simultaneously. One
has to balance them. The best tradeoffs among the objectives
can be defined in terms of Pareto optimality.
Manuscript received September 4, 2006; revised November 9, 2006.
The authors are with the Department of Computer Science, University
of Essex, Wivenhoe Park, Colchester, CO4 3SQ, U.K. (e-mail: qzhang@
essex.ac.uk; hlil@essex.ac.uk).
Digital Object Identifier 10.1109/TEVC.2007.892759
Let
, is said to dominate if and only if
for every and for at least one index
.
1
A point
is Pareto optimal to (1) if
there is no point
such that dominates .
is then called a Pareto optimal (objective) vector. In other words,
any improvement in a Pareto optimal point in one objective must
lead to deterioration in at least one other objective. The set of
all the Pareto optimal points is called the Pareto set (PS) and the
set of all the Pareto optimal objective vectors is the Pareto front
(PF) [1].
In many real-life applications of multiobjective optimization,
an approximation to the PF is required by a decision maker
for selecting a final preferred solution. Most MOPs may have
many or even infinite Pareto optimal vectors. It is very time-con-
suming, if not impossible, to obtain the complete PF. On the
other hand, the decision maker may not be interested in having
an unduly large number of Pareto optimal vectors to deal with
due to overflow of information. Therefore, many multiobjec-
tive optimization algorithms are to find a manageable number
of Pareto optimal vectors which are evenly distributed along the
PF, and thus good representatives of the entire PF [1]–[4]. Some
researchers have also made an effort to approximate the PF by
using a mathematical model [5]–[8].
It is well-known that a Pareto optimal solution to a MOP,
under mild conditions, could be an optimal solution of a scalar
optimization problem in which the objective is an aggregation of
all the
’s. Therefore, approximation of the PF can be decom-
posed into a number of scalar objective optimization subprob-
lems. This is a basic idea behind many traditional mathemat-
ical programming methods for approximating the PF. Several
methods for constructing aggregation functions can be found in
the literature (e.g., [1]). The most popular ones among them in-
clude the weighted sum approach and Tchebycheff approach.
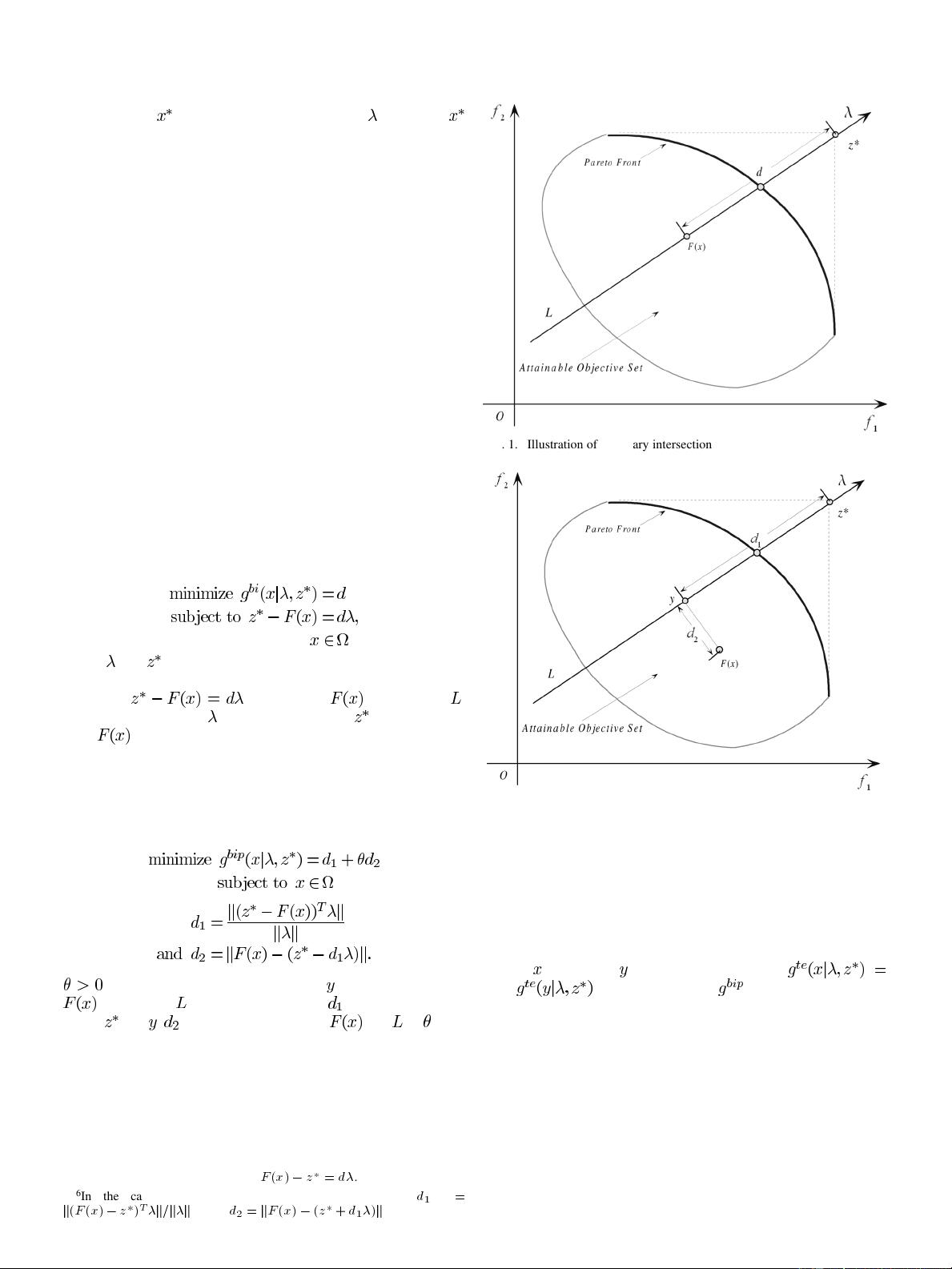
Recently, the boundary intersection methods have also attracted
a lot of attention [9]–[11].
There is no decomposition involved in the majority of the
current state-of-the-art multiobjective evolutionary algorithms
(MOEAs) [2]–[4], [12]–[19]. These algorithms treat a MOP as
a whole. They do not associate each individual solution with
any particular scalar optimization problem. In a scalar objective
optimization problem, all the solutions can be compared based
on their objective function values and the task of a scalar ob-
jective evolutionary algorithm (EA) is often to find one single
optimal solution. In MOPs, however, domination does not
define a complete ordering among the solutions in the objective
space and MOEAs aim at producing a number of Pareto op-
timal solutions as diverse as possible for representing the whole
PF. Therefore, conventional selection operators, which were
1
This definition of domination is for maximization. All the inequalities should
be reversed if the goal is to minimize the objectives in (1). “Dominate” means
“be better than.”
1089-778X/$25.00 © 2007 IEEE
Authorized licensed use limited to: Northeastern University. Downloaded on November 02,2020 at 14:30:56 UTC from IEEE Xplore. Restrictions apply.

剩余19页未读,继续阅读
资源评论













