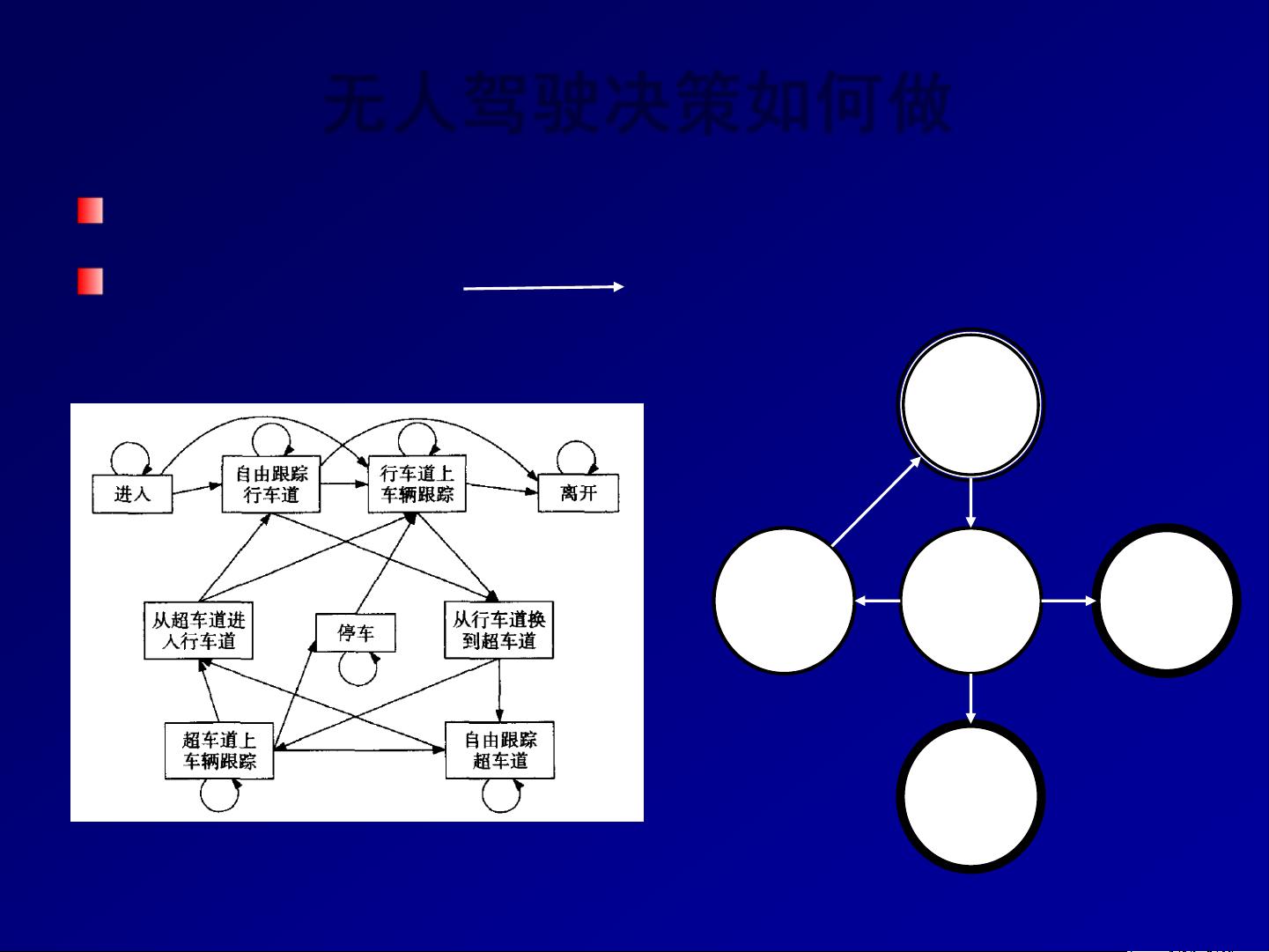
如何做自主决策? 每个传感器负责任地给出自己的三种算法的结果 – 导航信息 – 障碍物信息 – SLAM信息 如何将信息有效地融合到驾驶态势图中? 如何根据驾驶态势图做路径规划, 以及精准导航 和车辆控制? 如何让车辆在保证速度的情况下, 在各种任务模 式下都做出最切合中心线的精准控制?进一步
剩余27页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~