
38
专题
第 14 卷 第 8 期 2018 年 8 月
深入解读自动驾驶中的安全隐患
缘起
自动驾驶的历史最早可以追溯到 1980 年,当时
就有文献探讨了实现在复杂环境下自动控制自身运
动的车辆的可行性
[1, 2]
。传感器以及计算性能的发展
推动了自动驾驶的步伐。但是,自动驾驶的安全性
问题也引发了诸多讨论。例如,最近特斯拉和优步
造成的交通事故而导致人员的伤亡。这需要我们深
度了解自动化技术并开发真正安全和鲁棒的系统。
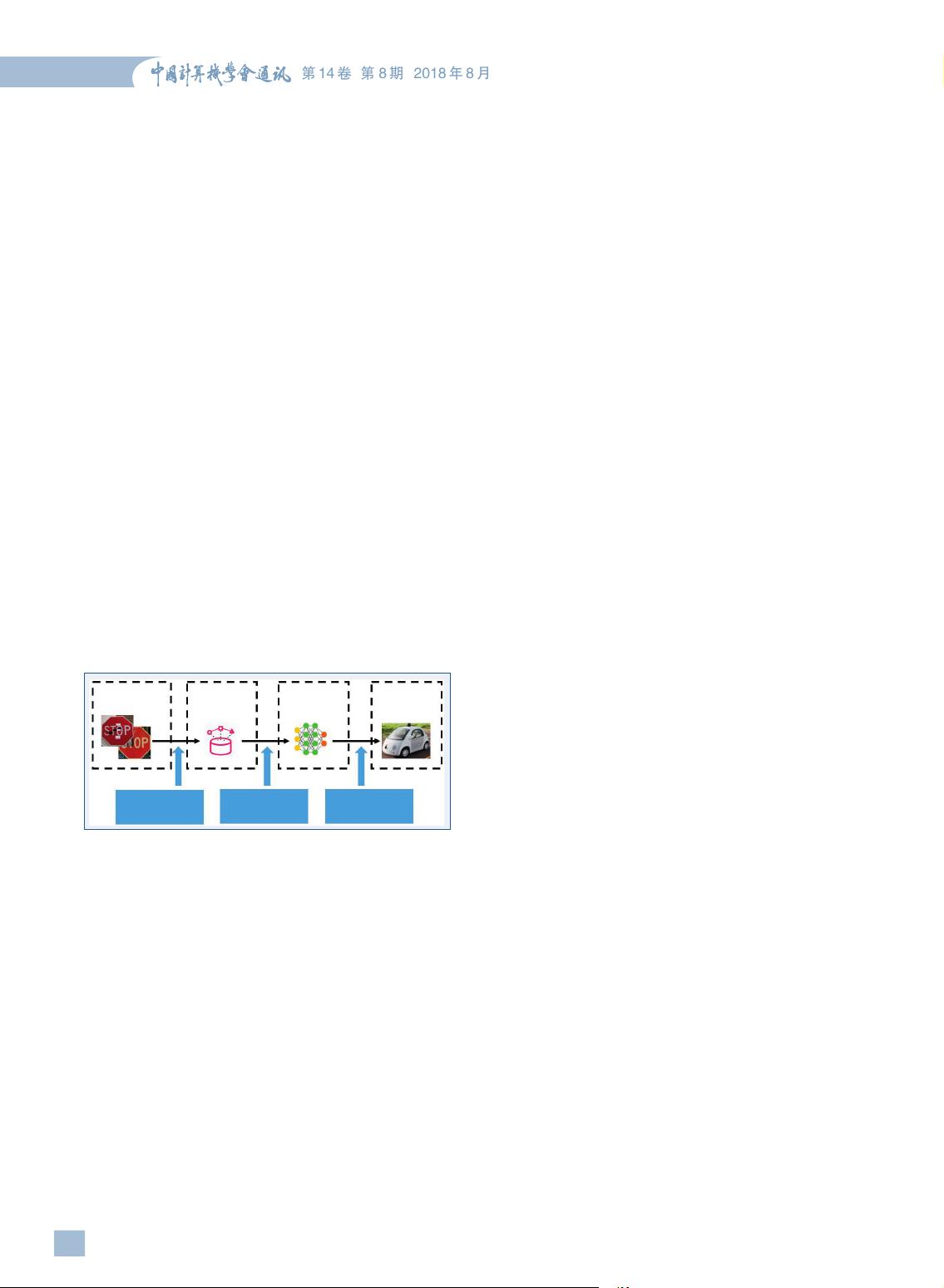
自动驾驶系统如图 1 所示,主要由传感、识别
和控制模块组成。控制模块包括行为控制和机械控
制。系统使用路径规划和强化学习算法,以自动实
现端到端的驾驶模型训练。
自动驾驶的识别模块攻击
自动驾驶的识别模块主要用于检测与自动驾驶
任务相关的各种类型的物体。这些物体包括车辆、
行人、车道标记和交通标志等。对识别模块的输入
可以是 3D 点云 ( 从激光雷达 ) 或 2D 图像。本文重
点讨论 2D 图像的输入。
在很多计算机视觉任务中
[3~5]
,最新的深度神
经网络已经达到了人类的识别水平。这些成功让深
度学习越来越多地被应用在实际的控制流水线系统
里,例如车辆
[6, 7]
、UAV s
[8, 9]
和机器人
[10]
。但是最
近对抗样本的研究表明,深度神经网络容易受到对
抗扰动的攻击
[11~20]
。在神经网络的视觉输入做一些
精心设计的小修改,有可能引起系统的异常行为甚
至是潜在的重大危险。
这一威胁最近引起了大量关注,计算机视觉也
在理解对抗样本空间方面有了不错的进展,从文
献 [11, 14, 19, 20]
对数字领域(根据场景修改图片)
的研究,到近年来
[21~24]
对物理世界的探索。我们面
临的挑战是理解扰动是否会真的造成机器学习模型
对真实物体的误判。我们选择路标分类作为我们的
讨论对象,原因是 :(1) 路标视觉图形相对简单,使
得对抗扰动更难隐藏。(2) 路标存在于复杂环境,随
着诸多物理条件如距离和相机的角度而变化。这意
味着,物理的对抗扰动对变化的环境仍然有效和鲁
棒。(3) 路标对驾驶安全非常重要。(4) 一个潜在的
对自动驾驶的威胁是,攻击者也许无法直接操控自
动驾驶系统,但是能够通过直接修改真实世界里的
物体,让自动驾驶系统做出错误的决策。
在生成针对分类器的物理对抗样本方面,文献
[25] 提出基于优化方法的物理对抗攻击 RP
2
(Robust
Physical Perturbations),能够为每一张图像
x
生成对
应的扰动。为了高效解决带约束的优化问题,与文
献 [16, 26] 类似,我们用拉格朗日松弛方法重新定
关键词 :
深度学习 对抗样本 自动驾驶
李 博 David A. Forsyth
伊利诺伊大学厄巴纳 - 香槟分校
图1 自动驾驶系统概览
物理世界 信号处理 机器学习
模型
实体控制
感知输入 数据处理 策略学习

剩余7页未读,继续阅读
资源评论


2008qianyg2008
- 粉丝: 4
- 资源: 14









最新资源
- 基于LSTM的淘宝商品评论分析系统详细文档+全部资料+优秀项目.zip
- 基于MKR模型的图书推荐系统 torch+flask+mysql——NLP详细文档+全部资料+优秀项目.zip
- 基于NLP的微博舆情分析系统详细文档+全部资料+优秀项目.zip
- 基于nlp的医疗问答系统详细文档+全部资料+优秀项目.zip
- 基于NLP和KNN的任务推荐系统详细文档+全部资料+优秀项目.zip
- 基于检索的问答系统详细文档+全部资料+优秀项目.zip
- 基于开放域事件提取的社会心态交互式挖掘与引导系统详细文档+全部资料+优秀项目.zip
- 基于篇章结构自动作文评分系统详细文档+全部资料+优秀项目.zip
- 基于实现一个舆情监控系统,具体基于对知乎热榜话题的数据抓取、分析与可视化。详细文档+全部资料+优秀项目.zip
- 基于文档的问答系统详细文档+全部资料+优秀项目.zip
- 基于医药知识图谱的智能问答系统详细文档+全部资料+优秀项目.zip
- 基于一个NLP旅游景点问答系统,基于BM25,Fuzzy算法实现详细文档+全部资料+优秀项目.zip
- 基于自然语言处理的智能医疗诊断系统详细文档+全部资料+优秀项目.zip
- 餐具包装纸袋包装机(sw12可编辑+CAD+说明书)全套技术开发资料100%好用.zip
- 岚精灵扫码挪车系统(移动端)(用户端-管理端)
- QWG(RZ)22-2004 高强度焊接结构用热连轧钢板和钢带.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


