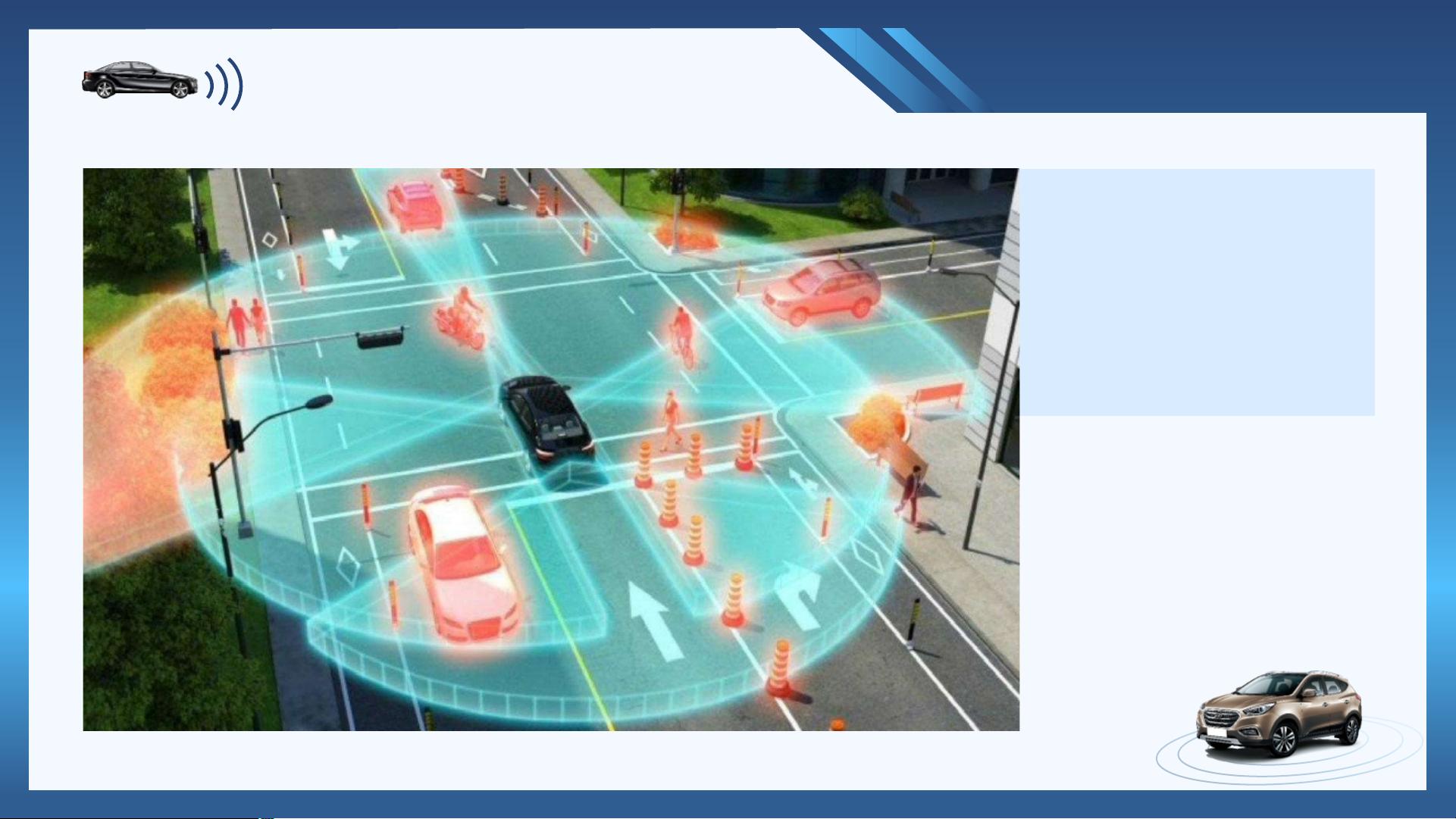
自动驾驶环境感知技术是现代智能车辆的关键组成部分,其中车载传感器起着至关重要的作用。这些传感器能够收集和处理大量的环境数据,确保车辆在复杂交通环境中安全、高效地运行。
车载传感器主要分为几大类,包括摄像头、红外夜视摄像头、毫米波雷达、激光雷达和超声波雷达。每种传感器都有其独特的优点和局限性:
1. 摄像头传感器:成本较低,能提供丰富的信息,可以识别物体,如交通标志、车辆、行人等。但它们在夜间、大雾或强光照射下可能失效,对测距的精度也有限。
2. 红外夜视摄像头:能在夜间提供极佳的视觉效果,不受天气影响,但不能进行图像识别,且测距性能一般。
3. 毫米波雷达:能全天候工作,不受天气影响,适用于检测距离较远的目标,但精度相对较低,且无法识别行人或交通标志。
4. 激光雷达(LiDAR):提供高精度的三维环境信息,用于精确的车辆定位和构建环境模型,但成本高昂,且在恶劣天气下可能受到影响。
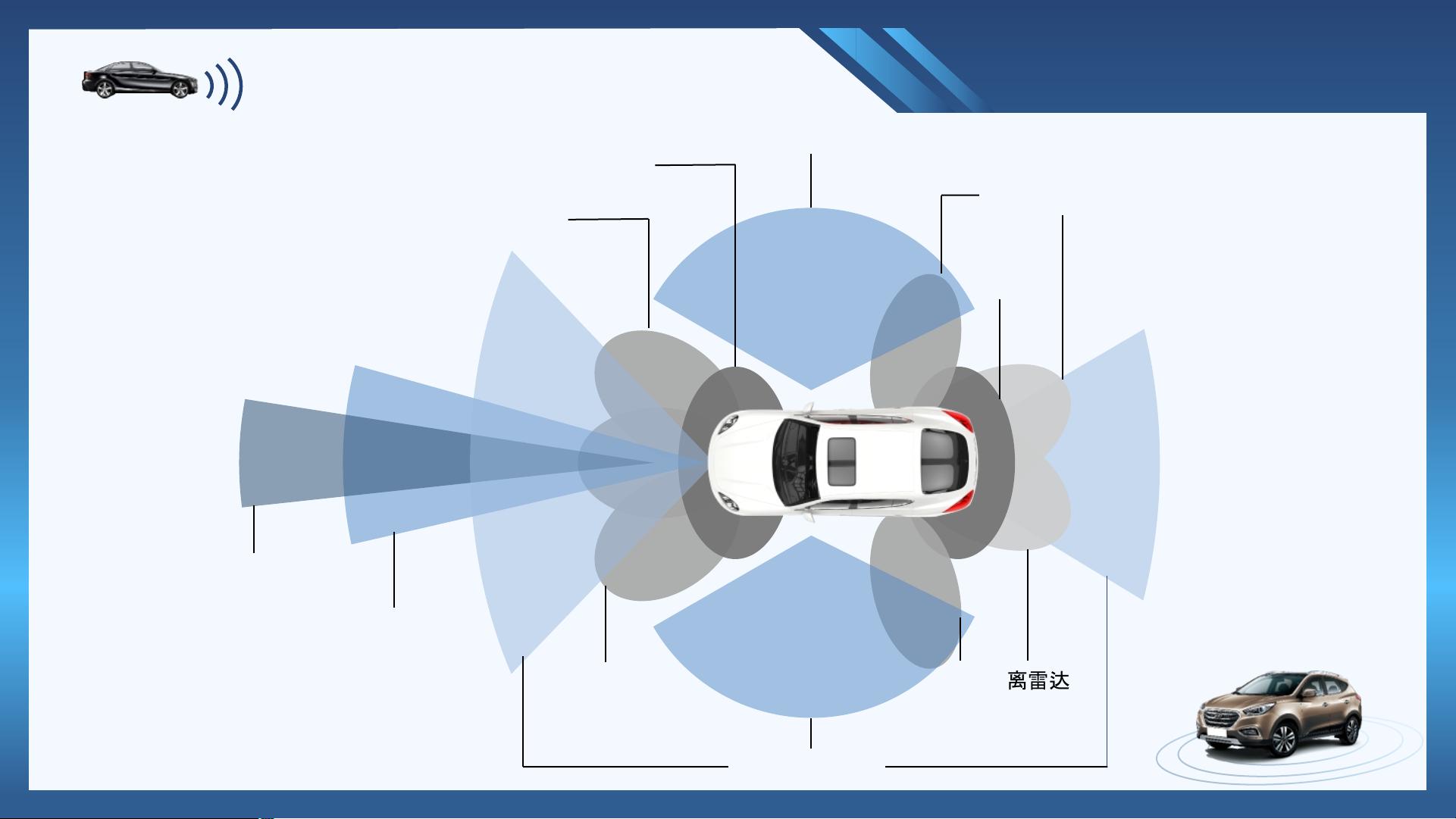
5. 超声波雷达:常用于短距离探测,如泊车辅助,对松软物体的检测能力较弱,且测量距离有限。
车载传感器的标定是确保这些传感器协同工作的关键步骤。标定包括了传感器内部参数的校准(内参标定),如摄像头的焦距,以及传感器与车辆坐标系之间转换关系的确定(外参标定)。例如,视觉类摄像机的标定涉及到将世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系进行精确计算。同样,激光雷达、毫米波雷达等其他传感器也需要进行类似的标定过程,以便在多传感器融合中提供一致的环境感知信息。
多传感器标定,如激光雷达与摄像机之间的标定,能提高数据融合的准确性和鲁棒性,使自动驾驶系统能更准确地识别交通信号、交通标志、车道线、行人、车辆和障碍物,实现自适应巡航、紧急制动、碰撞避免等功能。此外,还有单一传感器的标定,如单独对摄像机、激光雷达、毫米波雷达和超声波雷达进行校准,确保每个传感器自身的测量精度。
总之,车载传感器及其标定是自动驾驶技术的核心,它们的精准运作和协同配合,使得车辆能够在各种环境下实现安全、智能的驾驶。通过不断的技术进步和优化,未来的自动驾驶系统将会更加可靠,为我们的出行带来更高的安全性和舒适性。












评论1
最新资源