自动驾驶环境感知技术是现代智能车辆的关键组成部分,其中双目相机的标定与应用扮演着至关重要的角色。双目相机,即使用两个并排的摄像头,通过捕捉不同视角的图像,来实现类似人类双眼的立体视觉效果,从而计算物体的距离和深度信息,为自动驾驶系统提供重要的环境理解能力。
双目相机的标定过程主要分为以下几个步骤:
1. **单个摄像头的标定**:这是基础步骤,目的是获取摄像头的内参数和外参数。内参数包括焦距、主点坐标等,外参数则涉及摄像头在真实世界中的位置和姿态。这通常通过棋盘格等标定图案来完成,计算出摄像头的几何特性。
2. **双目摄像头的标定**:除了单目标定,双目相机还需要确定两个摄像头之间的相对位置和姿态,包括基线长度(B)、旋转和平移矩阵。这一步骤确保两个摄像头拍摄的图像可以正确对齐,以便后续的立体匹配。
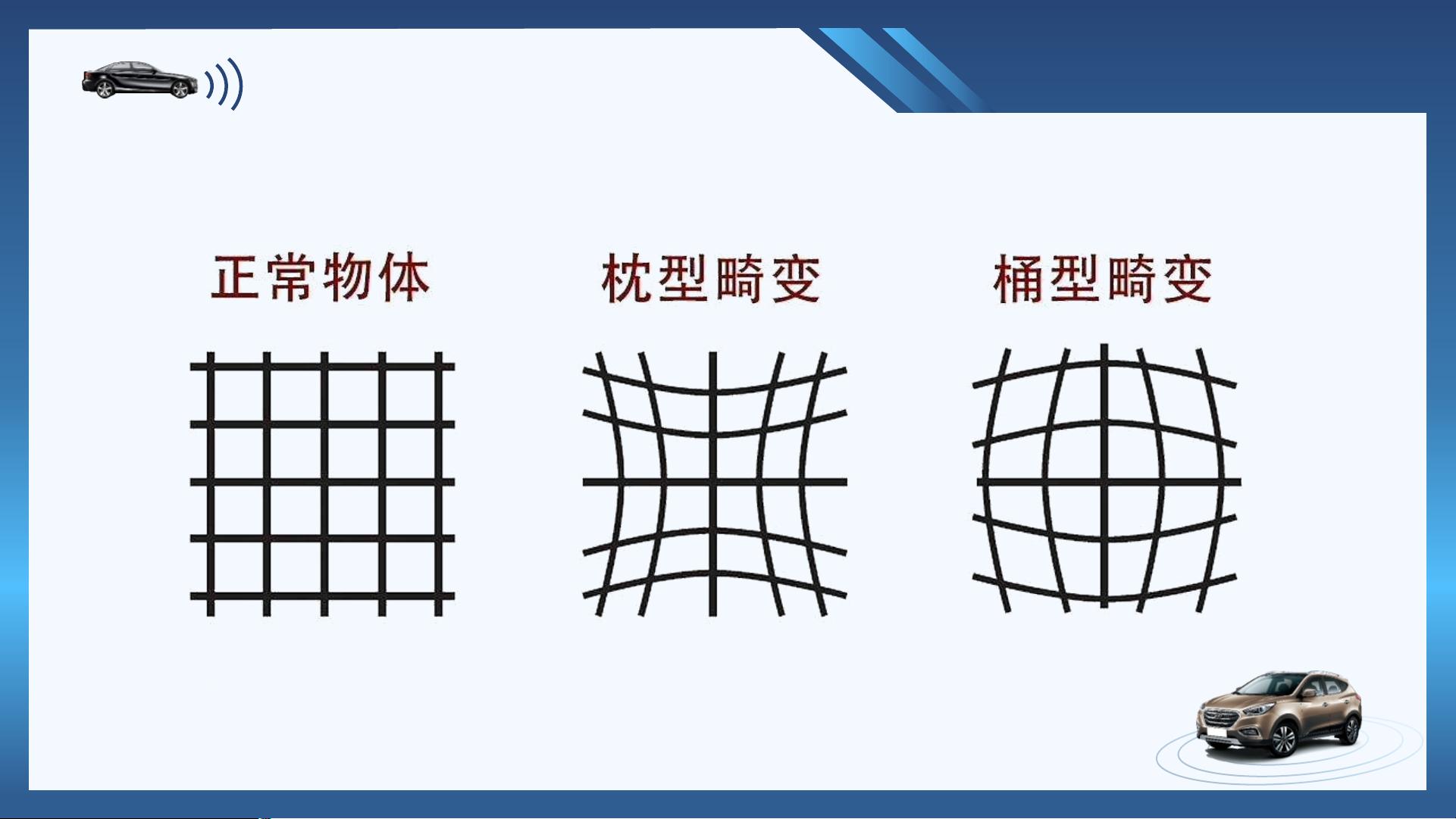
3. **图像校正**:标定后,需要消除由于镜头畸变等因素导致的图像失真。图像校正包括径向畸变和切向畸变的矫正,使得左右视图的成像效果更准确,便于后续处理。
4. **立体匹配**:在双目相机中,通过计算左右图像中对应点的视差(d),结合摄像头的焦距(f)和基线长度(B),可以计算出场景中每个像素的深度信息(Z)。立体匹配算法是关键,它寻找图像间的对应点,生成深度图,为自动驾驶系统提供3D环境信息。
5. **应用实例**:
- **点云矩阵**:通过视差图生成的点云数据,可以构建出场景的3D模型,用于路径规划和避障。
- **位置跟踪**:通过对双目相机运动的追踪,可以实时绘制车辆的运动轨迹,实现高精度的位置定位。
- **平面检测**:在自动驾驶中,双目相机可以识别出可行驶的平坦区域,帮助车辆安全行驶,避免陷入坑洼或离开道路。
双目相机的标定与应用是自动驾驶环境感知技术的核心环节,它为车辆提供了关键的深度信息,使得自动驾驶系统能更好地理解和响应周围环境,提高行驶的安全性和智能化水平。在实际操作中,通过专业的标定工具和步骤,可以不断优化双目相机的性能,以适应复杂多变的道路条件。









评论0
最新资源