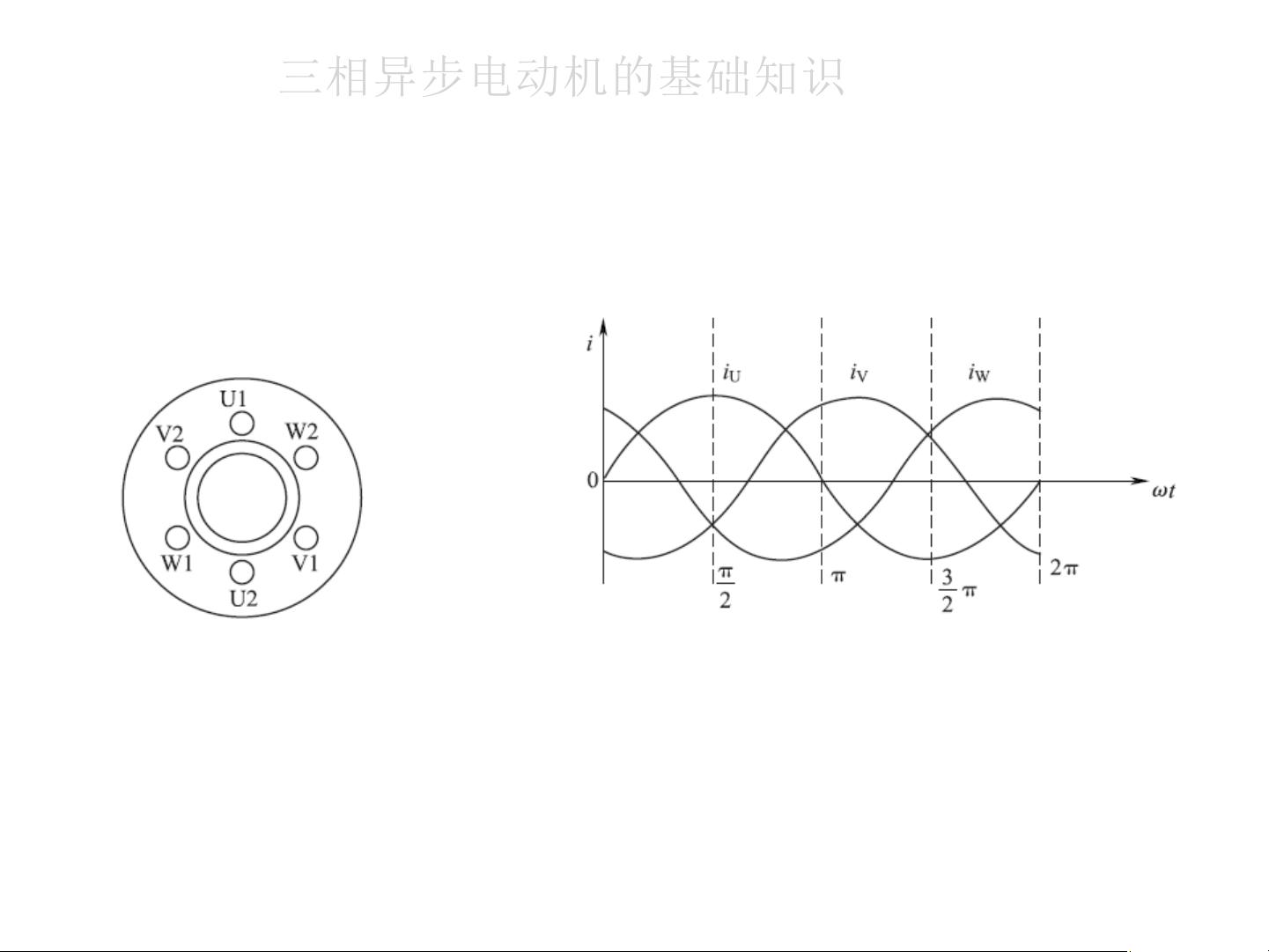
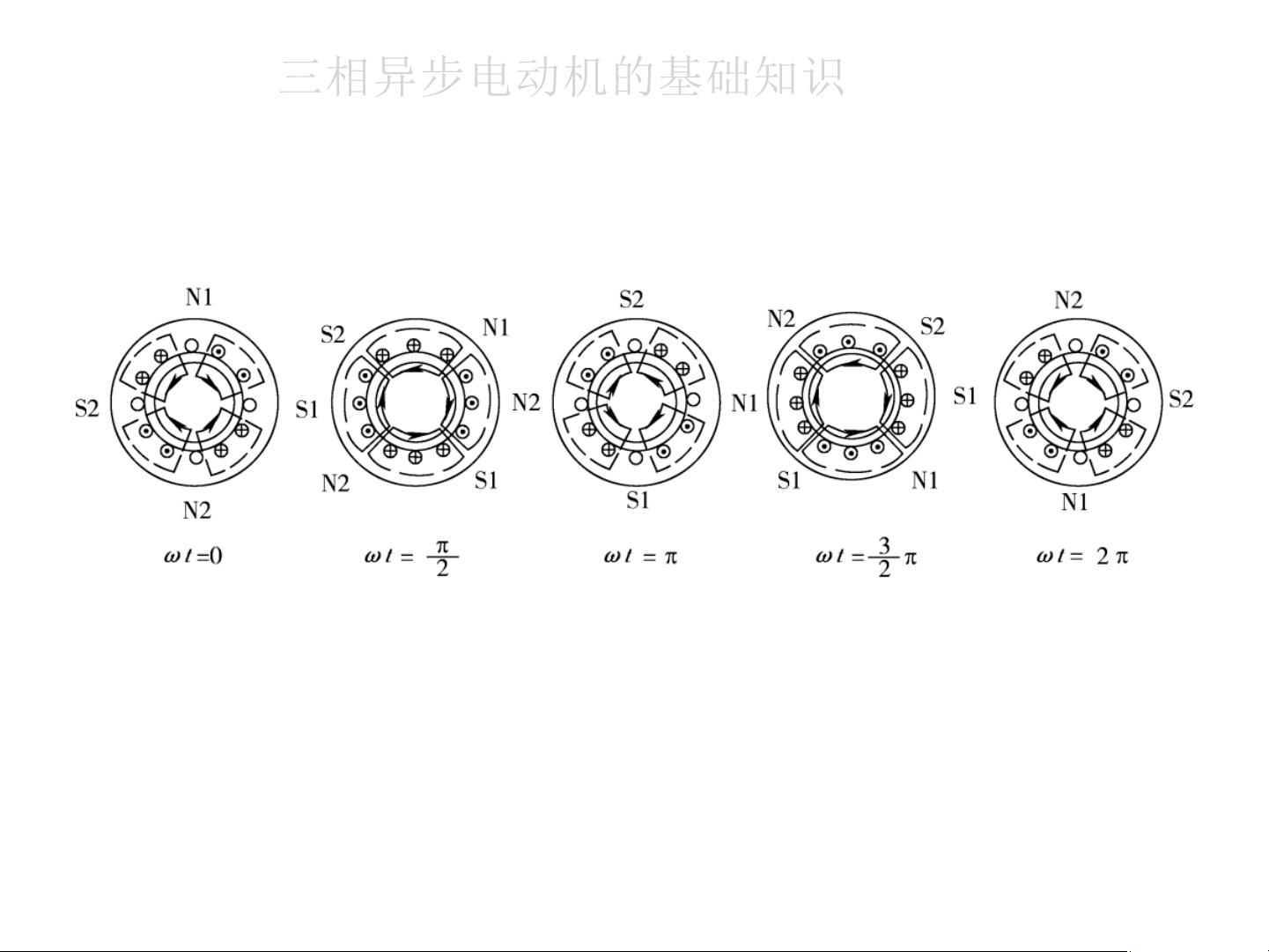
三相异步电动机是工业应用中非常常见的一种电动机,其工作原理主要涉及旋转磁场的产生、电动机的工作过程以及机械特性的理解。本文将深入解析这些关键知识点。 旋转磁场的产生是三相异步电动机工作的基础。当三相定子绕组(通常布置成星形或三角形连接)通入对称的三相交流电流时,如果每相绕组在定子铁心中间隔120°电角度,便会产生旋转磁场。电流的大小、频率和相位需保持一致,相差120°电角度,这样才能确保磁场的连续旋转。例如,对于一个4极电动机,旋转磁场的转速n1可由公式n1 = 120f/p计算得出,其中f是电源频率,p是磁极对数。 旋转磁场的旋转方向由三相电流的相序决定。改变电流的相序会改变旋转磁场的旋转方向,从而实现电动机的正反转控制。当旋转磁场通过定子时,它会在转子绕组中感应出电动势,进而产生感应电流。这个感应电流与旋转磁场相互作用,形成电磁力,产生电磁转矩,驱动转子旋转,最终带动机械负载。 转差率s是衡量电动机实际转速n与同步转速n1之间差异的重要参数,计算公式为s = (n1 - n) / n1。启动瞬间,转子静止,s = 1;空载时,n接近n1,s极小;在额定运行状态下,s通常在0.01至0.07之间。转差率决定了电动机的效率和功率因数。 三相异步电动机的电磁转矩T与转子电流I2和转子频率f2的关系由公式T = K * I2 * sqrt(f2/s)给出,其中K是常数。电磁转矩T决定了电动机的输出扭矩,进而影响负载的运行性能。 电动机的机械特性描述了转矩T与转速n之间的关系,分为稳定运行区和不稳定运行区。a点表示理想的空载运行状态,b点是电动机的稳定工作点,c点是临界点,对应的转差率Sm称为临界转差率,此时电磁转矩最大。d点对应启动瞬间的启动转矩Tst,是电动机克服自身和负载的静止惯性所需的最小扭矩。 三相异步电动机的工作原理涉及到电流、磁场、转速、转矩和机械特性等多个方面,理解和掌握这些基本知识对于电动机的运行控制和故障排查至关重要。
剩余15页未读,继续阅读








评论0
最新资源