
OpenCV 下车牌定位算法实现代码(一)
车牌定位算法在车牌识别技术中占有很重要地位,一个车牌识别系统的识别率往往取
决于车牌定位的成功率及准确度。
车牌定位有很多种算法,从最简单的来,车牌在图像中一般被认为是长方形,由于图
像摄取角度不同也可能是四边形。我们可以使用 中的实例:
这是一个搜索图片中矩形的一个算法。我们只要稍微修改一下
就可以实现定位车牌。
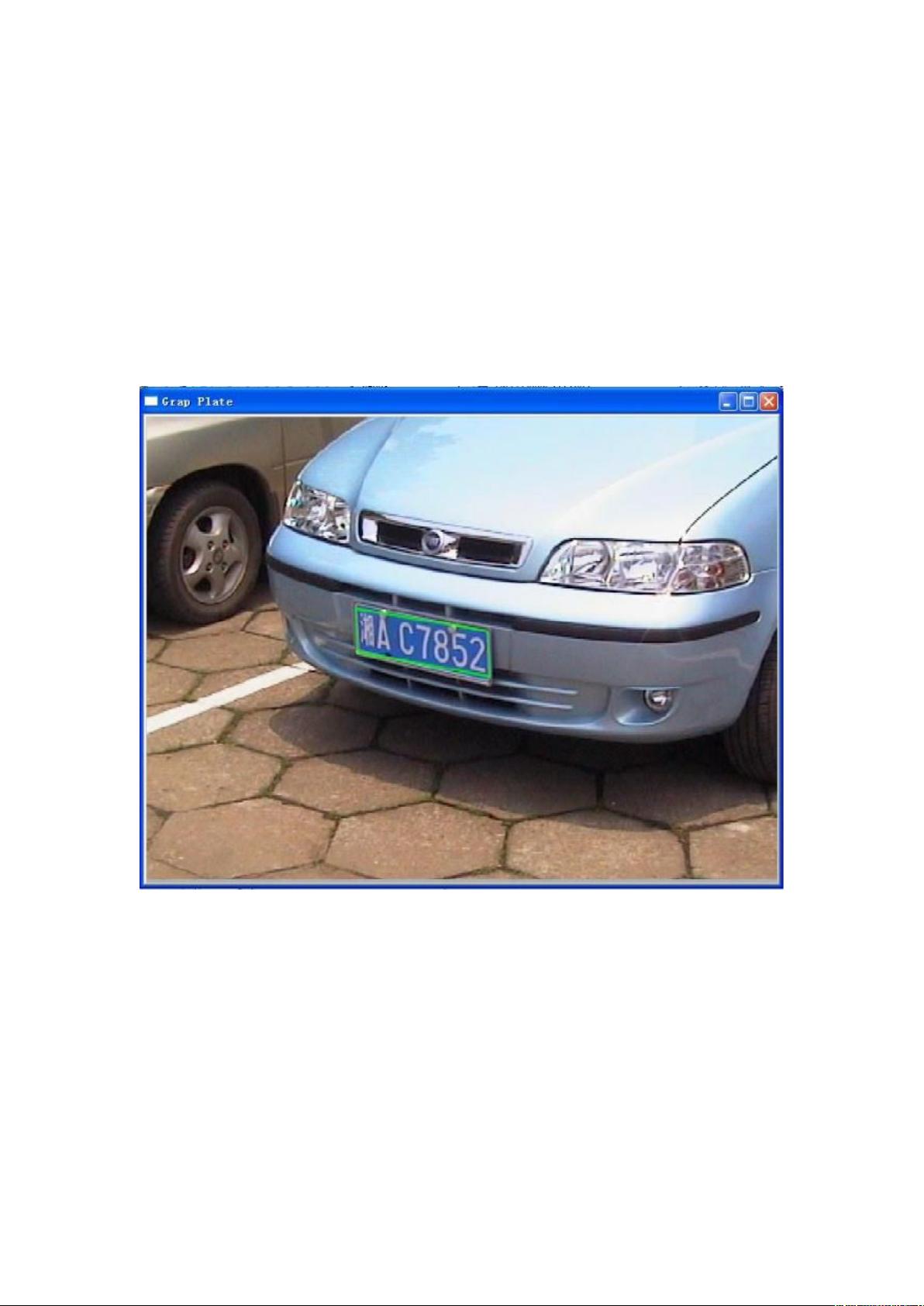
在这个实例中使用了 算法进行边缘检测,然后二值化,接着用 搜索
轮廓,最后从找到的轮廓中根据角点的个数,角的度数和轮廓大小确定,矩形位置。以下
是效果图:
这个算法可以找到一些车牌位置,但在复杂噪声背景下,或者车牌图像灰度与背景相差
不大就很难定位车牌。所以我们需要寻找更好的定位算法。下面是 的代码:
!"
#
$%$
$%%%$

剩余7页未读,继续阅读

u010964172
- 粉丝: 0
- 资源: 2









最新资源
- PowerBI-SVG 环形图
- 遥感目标检测、包含9种类型的遥感地物目标
- (25854638)基于51单片机可调电子时钟.zip
- 圆圈体机器防护垫检测5-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar
- (180342634)车牌号自动识别程序-matlab
- 网络培训第一期-网络拓扑配套
- 基于ssm的家庭食谱管理系统-源码(java毕业设计完整源码+LW).zip
- (180392842)微信小程序源码-小区租拼车管理信息系统-微信端-毕业设计源码-期末大作业.zip
- YOLO-目标检测-数据集-轴承缺陷-1456张已标注
- 基于ssm的网上报名系统源码(java毕业设计完整源码+LW).zip
- (174717822)功率放大电路2-模电Multisim仿真实验
- 通过无障碍服务(AccessibilityService)实现Android设备全局水印显示
- 基于ssm的会议管理系统的设计与实现源码(java毕业设计完整源码+LW).zip
- (14778022)超声波测距模块
- (176074008)基于WEB的仓库管理系统的设计与实现
- 调整任意角度机器台sw18全套设计资料100%好用.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
前往页