1
Faster R-CNN: Towards Real-Time Object
Detection with Region Proposal Networks
Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun
Abstract—State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations.
Advances like SPPnet [1] and Fast R-CNN [2] have reduced the running time of these detection networks, exposing region
proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network (RPN) that shares full-image
convolutional features with the detection network, thus enabling nearly cost-free region proposals. An RPN is a fully convolutional
network that simultaneously predicts object bounds and objectness scores at each position. The RPN is trained end-to-end to
generate high-quality region proposals, which are used by Fast R-CNN for detection. We further merge RPN and Fast R-CNN
into a single network by sharing their convolutional features—using the recently popular terminology of neural networks with
“attention” mechanisms, the RPN component tells the unified network where to look. For the very deep VGG-16 model [3],
our detection system has a frame rate of 5fps (including all steps) on a GPU, while achieving state-of-the-art object detection
accuracy on PASCAL VOC 2007, 2012, and MS COCO datasets with only 300 proposals per image. In ILSVRC and COCO
2015 competitions, Faster R-CNN and RPN are the foundations of the 1st-place winning entries in several tracks. Code has been
made publicly available.
Index Terms—Object Detection, Region Proposal, Convolutional Neural Network.
F
1 INTRODUCTION
Recent advances in object detection are driven by
the success of region proposal methods (e.g., [4])
and region-based convolutional neural networks (R-
CNNs) [5]. Although region-based CNNs were com-
putationally expensive as originally developed in [5],
their cost has been drastically reduced thanks to shar-
ing convolutions across proposals [1], [2]. The latest
incarnation, Fast R-CNN [2], achieves near real-time
rates using very deep networks [3], when ignoring the
time spent on region proposals. Now, proposals are the
test-time computational bottleneck in state-of-the-art
detection systems.
Region proposal methods typically rely on inex-
pensive features and economical inference schemes.
Selective Search [4], one of the most popular meth-
ods, greedily merges superpixels based on engineered
low-level features. Yet when compared to efficient
detection networks [2], Selective Search is an order of
magnitude slower, at 2 seconds per image in a CPU
implementation. EdgeBoxes [6] currently provides the
best tradeoff between proposal quality and speed,
at 0.2 seconds per image. Nevertheless, the region
proposal step still consumes as much running time
as the detection network.
• S. Ren is with University of Science and Technology of China, Hefei,
China. This work was done when S. Ren was an intern at Microsoft
Research. Email: sqren@mail.ustc.edu.cn
• K. He and J. Sun are with Visual Computing Group, Microsoft
Research. E-mail: {kahe,jiansun}@microsoft.com
• R. Girshick is with Facebook AI Research. The majority of this work
was done when R. Girshick was with Microsoft Research. E-mail:
rbg@fb.com
One may note that fast region-based CNNs take
advantage of GPUs, while the region proposal meth-
ods used in research are implemented on the CPU,
making such runtime comparisons inequitable. An ob-
vious way to accelerate proposal computation is to re-
implement it for the GPU. This may be an effective en-
gineering solution, but re-implementation ignores the
down-stream detection network and therefore misses
important opportunities for sharing computation.
In this paper, we show that an algorithmic change—
computing proposals with a deep convolutional neu-
ral network—leads to an elegant and effective solution
where proposal computation is nearly cost-free given
the detection network’s computation. To this end, we
introduce novel Region Proposal Networks (RPNs) that
share convolutional layers with state-of-the-art object
detection networks [1], [2]. By sharing convolutions at
test-time, the marginal cost for computing proposals
is small (e.g., 10ms per image).
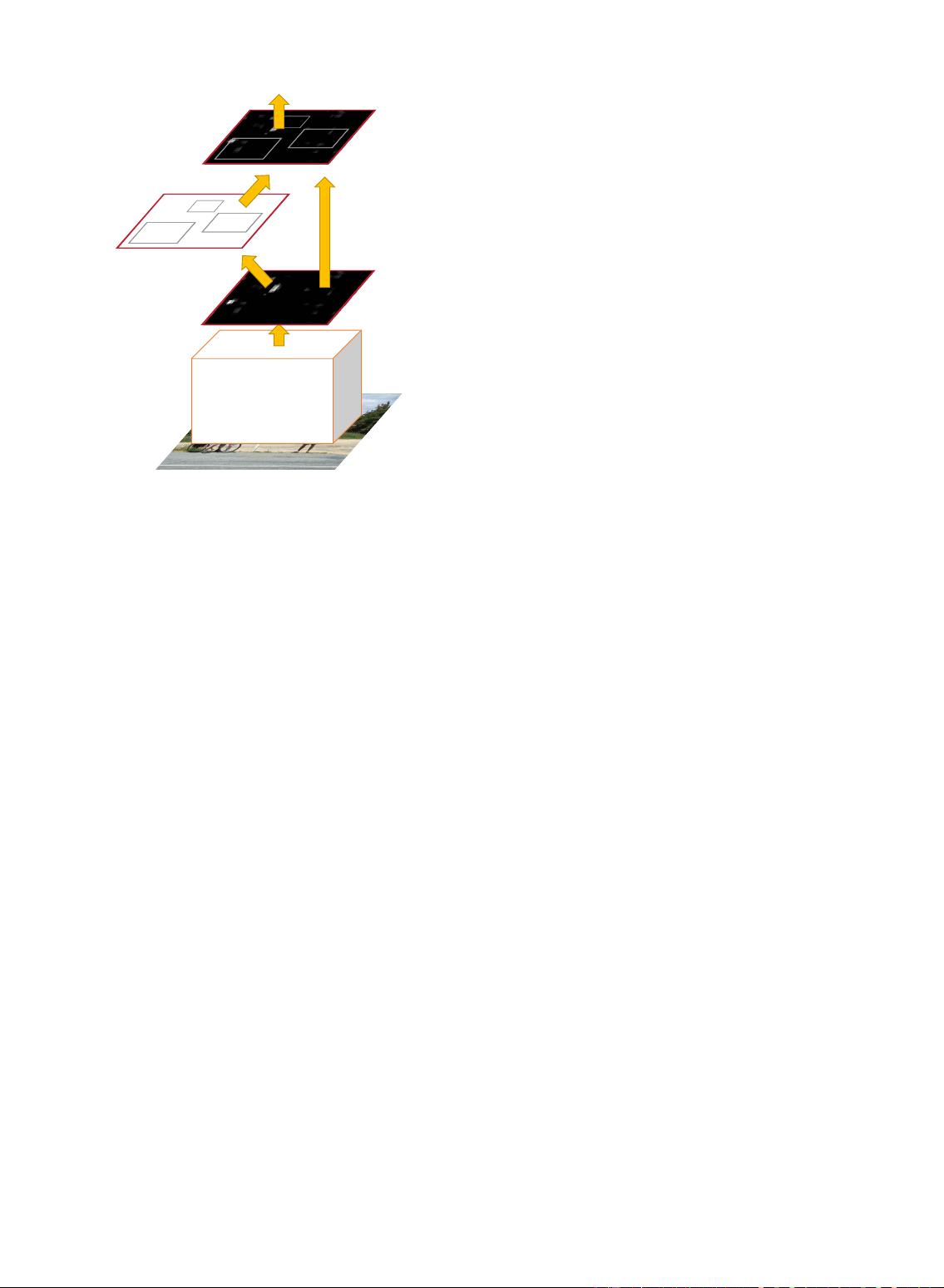
Our observation is that the convolutional feature
maps used by region-based detectors, like Fast R-
CNN, can also be used for generating region pro-
posals. On top of these convolutional features, we
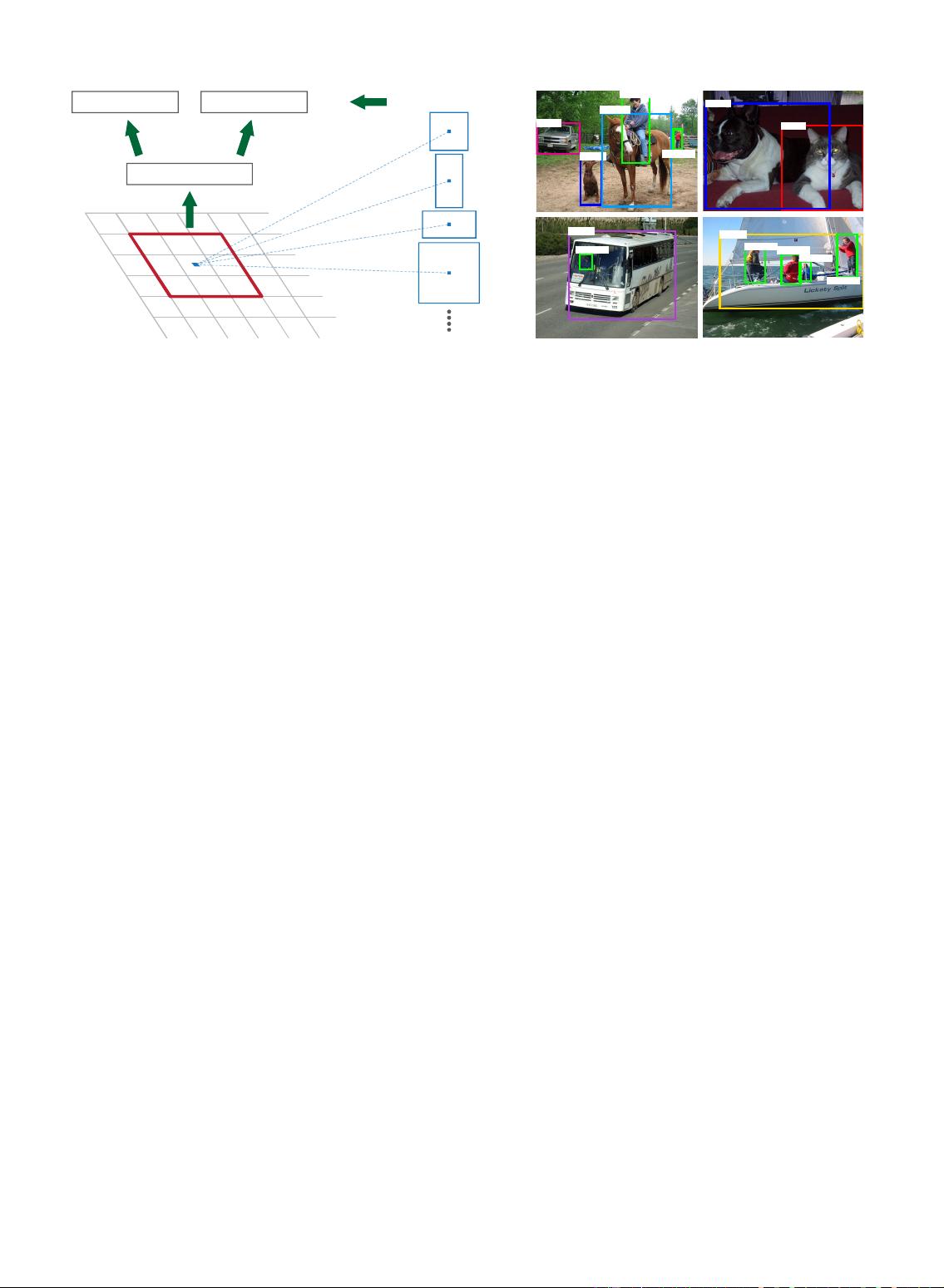
construct an RPN by adding a few additional con-
volutional layers that simultaneously regress region
bounds and objectness scores at each location on a
regular grid. The RPN is thus a kind of fully convo-
lutional network (FCN) [7] and can be trained end-to-
end specifically for the task for generating detection
proposals.
RPNs are designed to efficiently predict region pro-
posals with a wide range of scales and aspect ratios. In
contrast to prevalent methods [8], [9], [1], [2] that use
arXiv:1506.01497v3 [cs.CV] 6 Jan 2016