

步进电机控制及驱动电路的设计
1.步进电机原理及硬件和软件设计
1.1 步进电机简介
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超
载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载
变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动
一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通
过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频
率来控制电机转动的速度和加速度,从而达到调速的目的。
1.2 步进电机基本原理
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。
该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定
子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动
机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成
正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动
机各相绕组的通电顺序来控制步进电机的转动。
1.3 步进电机驱动方法
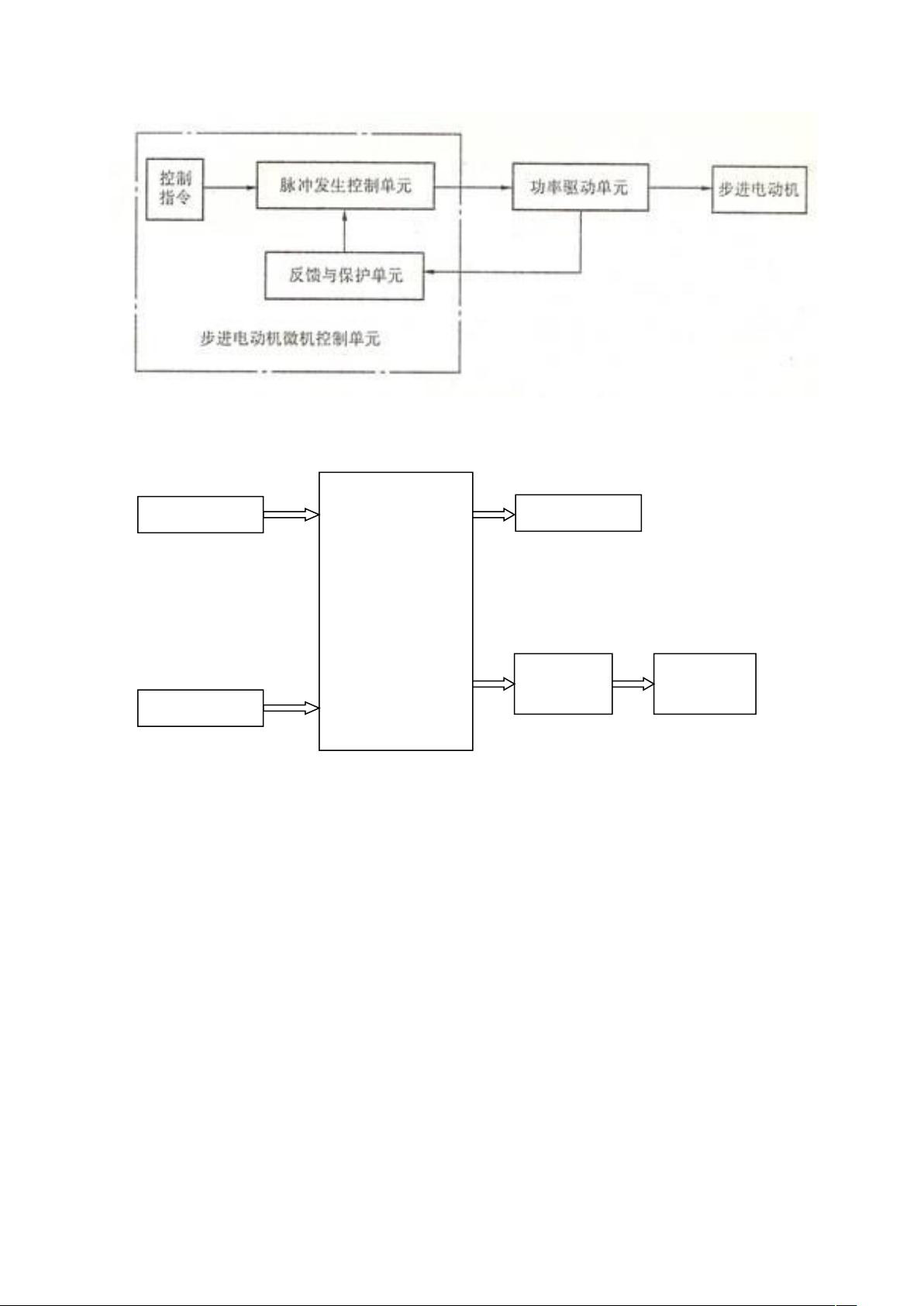
步进电机不能直接接到工频交流或直流电源上工作,而必须使用专用的步进电
动机驱动器,如下图所示。它由脉冲发生控制单元、功率驱动单元、保护单元等组成。
图中点划线所包围的二个单元可以用微机控制来实现。驱动单元与步进电动机直接耦
合,也可理解成步进电动机微机控制器的功率接口。
剩余7页未读,继续阅读
资源评论













