
doi: 10.16576/j.cnki.1007
-
4414.2019.01.049
卷积神经网络在无人驾驶感知技术上的应用
*
刘新磊
,
赵星洋
,
王琪琛
(
山东交通学院
,
山东 济南
250300)
摘 要
:
对卷积神经网络
( CNN)
的目标检测方面展开研究
,
将识别精度较高的
Faster RCNN
网络框架进行了改进
,
并
应用于无人驾驶视觉感知系统中
。
利用改进算法进行了不同场景的车辆检测仿真实验
。
应用了
MATLAB
的计算机
视觉系统工具箱对改进的算法进行快速验证
,
并应用了驾驶场景设计器对多传感器融合及模拟道路场景进行构建
;
应用了
Simulink
和
Embedded Coder
分别进行视觉控制系统设计及自动代码生成
。
实验结果表明
:
改进算法的平均检
测精度达到
80%
以上
,
具有较高的可行性及鲁棒性
,
上述解决方案可加快无人驾驶安全感知系统的研发速度
,
缩短研
发周期
。
关键词
:
卷积神经网络
;
视觉感知
;
无人驾驶汽车
;
深度学习
中图分类号
: TP391.9
文献标志码
: A
文章编号
: 1007
-
4414( 2019) 01
-
0156
-
04
Application of Convolutional Neural Network Based on MATLAB in the Unmanned Sensing Technology
LIU Xin
-
lei,ZHAO Xing
-
yang,WANG Qi
-
chen
( Shandong Jiaotong University,Jinan Shandong 250300,China)
Abstract: In this paper,the research on target detection of convolutional neural network ( CNN) is carried out; the Faster
RCNN network framework with higher recognition accuracy is improved and applied to the unmanned visual perception system.
The improved algorithm is used to carry out the simulation experiments of vehicle detection in different scenes. The computer
vision system toolbox of MATLAB is used to quickly verify the improved algorithm,and the driver scene designer is used to
build the multi
-
sensor fusion and simulation road scene. The Simulink and Embedded Coder are used for visual control system
design and automatic code generation respectively. Experimental results show that the average detection accuracy of the im-
proved algorithm is more than 80%,which is of high feasibility and robustness. The above solutions can speed up the develop-
ment of unmanned safety perception system and shorten the development cycle.
Key words: convolutional neural network; visual perception; autonomous vehicle; deep learning
0
引 言
随着近年来人工智能技术的迅猛发展
,
以深度学
习为核心的视觉感知技术有了突破式进展
。
目前
,
国
内在百度
Apollo
开源平台支持下
,
已有金龙汽车的
“
阿波龙
”
和托尔泰克的
“
阿波牛
”
实现了量产
。
智行
者
、
驭势科技
、
蔚来汽车等创业公司也实现了各具优
势的无人驾驶解决方案
。
清华大学
、
国防科技大学
、
北京理工大学
、
西南交通大学等高校共同参与的中国
智能车未来挑战赛也极大促进了相关技术的理论研
究及普及
。
环境感知
[1]
作为无人驾驶汽车极为关键
的部分
,
以深度学习为基础的目标检测算法在识别速
度和精度上还有待提高
[2]
。
因此
,
笔者将
Faster RC-
NN
算法进行改进
,
并通过
MATLAB
计算机视觉工具
箱快速验证其合理性
,
然后提出了基于
MATLAB
仿
真系统的视觉感知场景模拟方案
。
1
传统神经网络
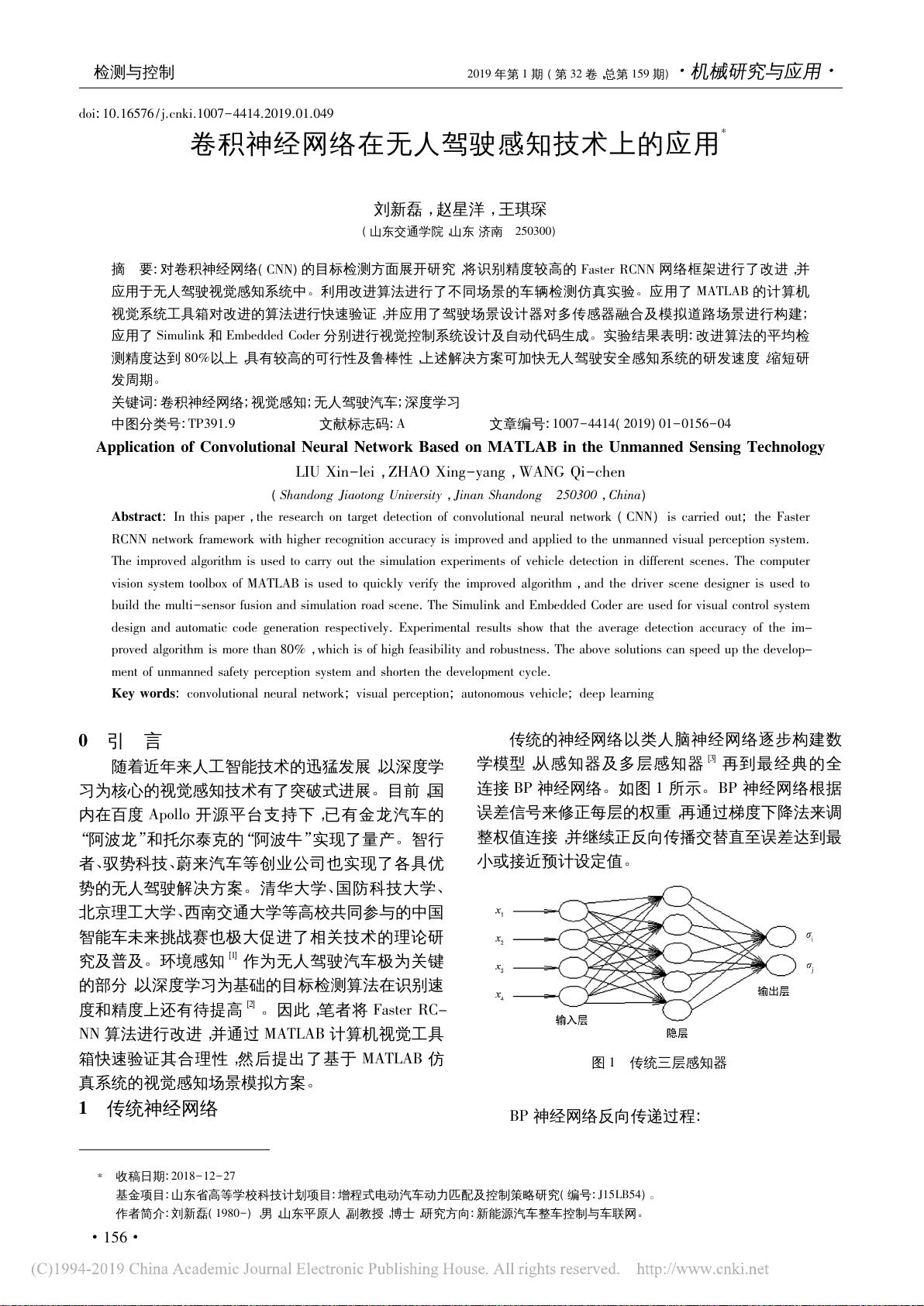
传统的神经网络以类人脑神经网络逐步构建数
学模型
,
从感知器及多层感知器
[3]
再到最经典的全
连接
BP
神经网络
。
如图
1
所示
。BP
神经网络根据
误差信号来修正每层的权重
,
再通过梯度下降法来调
整权值连接
,
并继续正反向传播交替直至误差达到最
小或接近预计设定值
。
图
1
传统三层感知器
BP
神经网络反向传递过程
:
·651·
检测与控制
2019
年第
1
期
(
第
32
卷
,
总第
159
期
)
·
机械研究与应用
·
*
收稿日期
: 2018
-
12
-
27
基金项目
:
山东省高等学校科技计划项目
:
增程式电动汽车动力匹配及控制策略研究
(
编号
: J15LB54) 。
作者简介
:
刘新磊
( 1980
-
) ,
男
,
山东平原人
,
副教授
,
博士
,
研究方向
:
新能源汽车整车控制与车联网
。
资源评论













